
Inclus dans ce forfait
- 1 X RB-Unt-230 - Unitree Dex1-1 V3 Main pour Unitree H2 (gauche)
- 1 X RB-Unt-233 - Unitree Dex1-1 V3 Main pour Unitree H2 (Droite)
Description
- 1x Unitree Dex1-1 V3 Main pour Unitree H2 (Gauche)
- 1x Unitree Dex1-1 V3 Main pour Unitree H2 (Droite)
Remarque : Il s'agit d'une pièce de réparation auto-développée et ne peut pas être achetée séparément ; elle doit être commandée avec une unité H2.
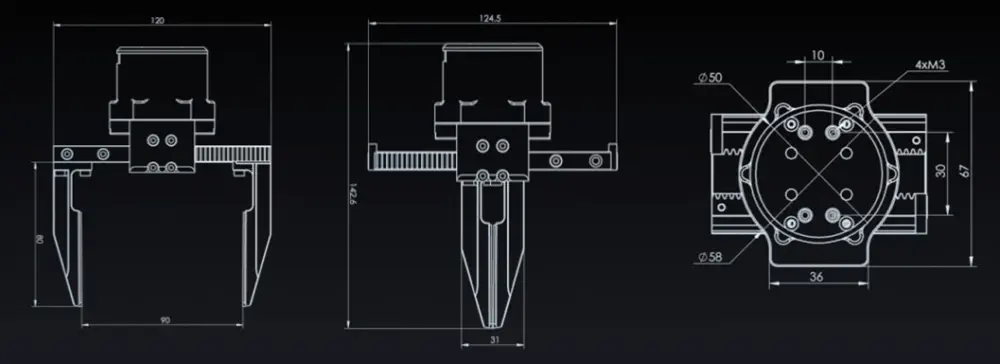
- 143 x 78 x 67 mm
- Course : 90 mm
- Longueur de la mâchoire : 80 mm
- Force de préhension (Réglable) : 5 ~ 120 N
- Vitesse (Réglable) : 50 ~ 375 mm/s
- Résolution de position (Bout des doigts) : 0,1 mm
- Charge de préhension (Adaptation de forme) : 20 kg
- Charge de préhension (Friction) : 5 kg
- Temps de fermeture le plus court en pleine course : 0,24 s
- Protocole de communication : 485 haute vitesse
- Débit en bauds de communication : 6 Mbps
- Fréquence de contrôle de communication : 1000 Hz
- Tension de fonctionnement : 24 V ~ 64 V (24 / 48 V DC recommandé)
- Courant statique : 0,03 A
- Courant de ligne de crête : 3,5 A
- Couple de crête du moteur : 5 N.m
- Vitesse maximale du moteur : 27 rad/s (avec alimentation 64V)
- Environnement de fonctionnement recommandé : -20 °C ~ 60 °C
- Rapport de réduction du moteur : 1:25
- Résolution de l'encodeur du moteur : 15 bits
- Type d'encodeur du moteur : Encodeur absolu
- Retour d'état du moteur : Angle, Vitesse angulaire, Couple, Température
- Instruction de contrôle du moteur : Angle, Vitesse angulaire, Couple, Rigidité, Amortissement
- Compatibilité : Robot humanoïde Unitree H2 (Main gauche, Main droite)