





Description
- Unitree Dex1-1 V3 Main pour Unitree H2 (gauche)
- Pour le robot humanoïde Unitree H2
La Unitree Dex1-1 V3 Main pour Unitree H2 (gauche) représente l'édition ultime de la série Dex1-1, offrant le plus haut niveau d'intégration de capteurs et de capacités pour le robot humanoïde Unitree H2. Cette pince avancée pour la main gauche peut être achetée comme unité autonome ou installée sur la base H2 par l'utilisateur. L'installation est simple, avec des instructions claires fournies. Elle est également disponible comme pièce de réparation ou de remplacement, ce qui la rend adaptée à un entretien à long terme ou à des mises à niveau du système.
Comparé aux versions antérieures, le package V3 inclut à la fois une caméra RGB et une caméra de profondeur D405 entièrement intégrée, chacune avec son matériel de montage dédié. Une carte de conversion 485-vers-USB, ainsi que tous les câbles et accessoires nécessaires, est incluse pour une connectivité sans faille. Avec un support complet pour le développement secondaire via les interfaces robotiques fournies, le V3 est idéal pour la recherche, les tâches riches en perception et la manipulation robotique avancée.

Note : Les prix et spécifications concernent une unité de main unique. Typiquement, deux pinces sont utilisées par robot humanoïde H2 pour une fonctionnalité bimanuelle complète.
- 1x Unitree Dex1-1 V3 Main pour Unitree H2 (gauche)
Note : Ceci est une pièce de réparation auto-développée et ne peut pas être achetée séparément ; elle doit être commandée avec une unité H2. Veuillez spécifier main gauche ou droite lors de la commande.
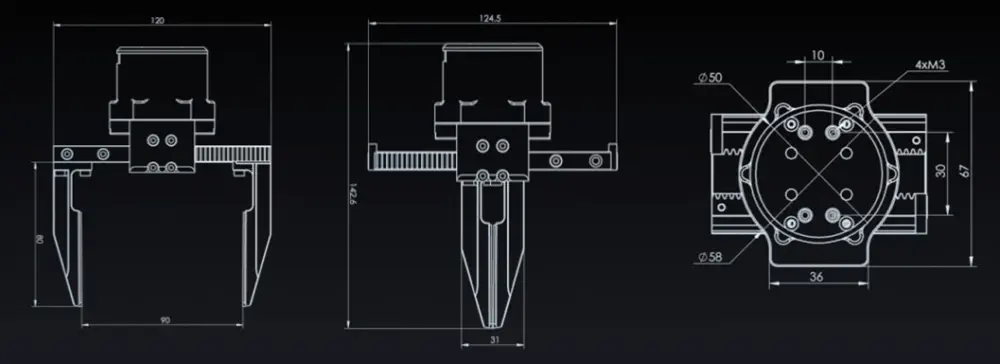
- 143 x 78 x 67 mm
- Course : 90 mm
- Longueur de la mâchoire : 80 mm
- Force de préhension (réglable) : 5 ~ 120 N
- Vitesse (réglable) : 50 ~ 375 mm/s
- Résolution de position (bout des doigts) : 0,1 mm
- Charge de préhension (adaptation de forme) : 20 kg
- Charge de préhension (friction) : 5 kg
- Temps de fermeture le plus court pour la course complète : 0,24s
- Protocole de communication : 485 haute vitesse
- Débit en bauds de communication : 6 Mbps
- Fréquence de contrôle de communication : 1000 Hz
- Tension de fonctionnement : 24 V ~ 64 V (24 / 48 V DC recommandé)
- Courant statique : 0,03 A
- Courant de ligne de crête : 3,5 A
- Couple de crête du moteur : 5 N.m
- Vitesse maximale du moteur : 27rad/s (avec alimentation 64 V)
- Environnement de fonctionnement recommandé : -20 °C ~ 60 °C
- Rapport de réduction du moteur : 1:25
- Résolution de l'encodeur moteur : 15 bits
- Type d'encodeur moteur : Encodeur absolu
- Retour d'état du moteur : Angle, Vitesse angulaire, Couple, Température
- Instruction de contrôle du moteur : Angle, Vitesse angulaire, Couple, Rigidité, Amortissement
- Compatibilité : Robot humanoïde Unitree H2 (Main gauche)
- Poids : 550 g