

Paiements et sécurité
Vos informations de paiement sont traitées de manière sécurisée. Nous ne stockons pas les informations relatives aux cartes de crédit et n'avons pas accès à ces informations.
Description
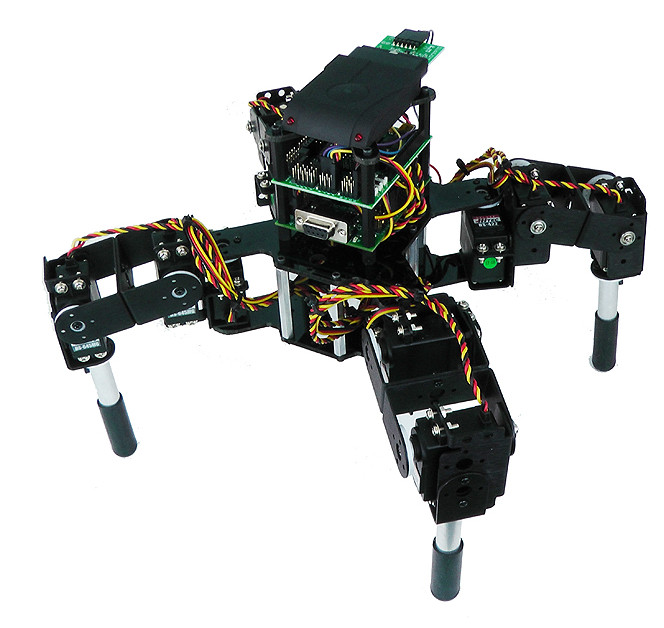
- Plate-forme robotique quadrupède à marche symétrique
- Livrée avec le contrôleur de servomoteur SSC-32 et le microcontrôleur BotBoarduino
- Robot quadrupède à 3 degrés de liberté par jambe avec une conception symétrique du châssis
- Idéale pour des laboratoires de robotique d'établissements du secondaire et les personnes cherchant à débuter dans la création de code pour les robots quadrupèdes
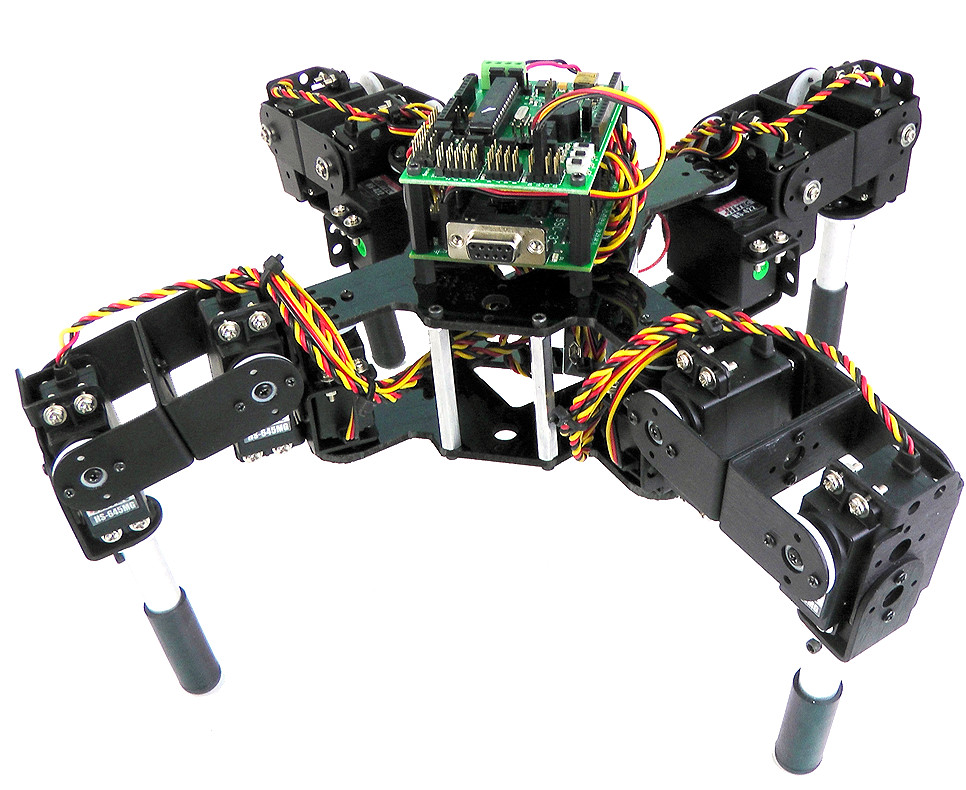
Le Robot quadrupède à marche symétrique SQ3U de Lynxmotion est un robot quadrupède à 3 degrés de liberté par jambe avec une conception symétrique du châssis. La symétrie du robot en fait un marcheur quadrupède totalement unique. La conception à 3 degrés de liberté des jambes offre la souplesse requise pour avancer dans n'importe quelle direction. Le robot utilise quatre servomoteurs HS-645MG associés à quatre servomoteurs HS-422. Le kit combo comprend tous les éléments nécessaires pour créer un robot opérationnel, à l'exception des batteries, du chargeur et de la manette PS2. Ce robot étudié pour la recherche est idéal pour des laboratoires de robotique d'établissements du secondaire et les personnes cherchant à débuter dans la création de code pour des robots quadrupèdes.
La mécanique
Les jambes sont constituées de supports ultra résistants en aluminium de haute qualité du kit de montage des servomoteurs, et la structure est en Lexan. Le robot fait 15,24 cm de haut une fois debout (du pieds au haut du support, sans l'électronique) et 24,13 cm de large (d'un pied à l'autre).
Contrôle du robot
Le kit combo est livré avec le contrôleur de servomoteur SSC-32 et le microcontrôleur BotBoarduino. En déchargeant le servomoteur de la génération des impulsions et de la séquence de synchronisation des mouvements vers le SSC-32, la carte mère dispose de beaucoup de puissance pour faire des choses vraiment sympas. Le code PS2 de base vous permet de contrôler le robot à l'aide d'une télécommande PS2 sans fil (ou filaire).
Options d'alimentation
Le robot nécessite une (x1) batterie de 4,8à 6 V (le 6 V est recommandé) et une (x1) autre de 9 V. Si vous préférez n'utiliser qu'un seul bloc d'alimentation, vous pouvez acheter un régulateur de tension. Les batteries et les chargeurs suivants sont conseillés (vendus séparément).
- Chargeurs
- Chargeurs intelligents universels NiCad et Ni-MH
- Batteries
- Ensemble batterie de 2 800 mAh Ni-MH de 6 V
Caractéristiques
- Plate-forme robotique quadrupède à marche symétrique
- Utilise des contrôleurs de servomoteurs BotBoarduino (microcontrôleurs à base d'Arduino) et SSC-32
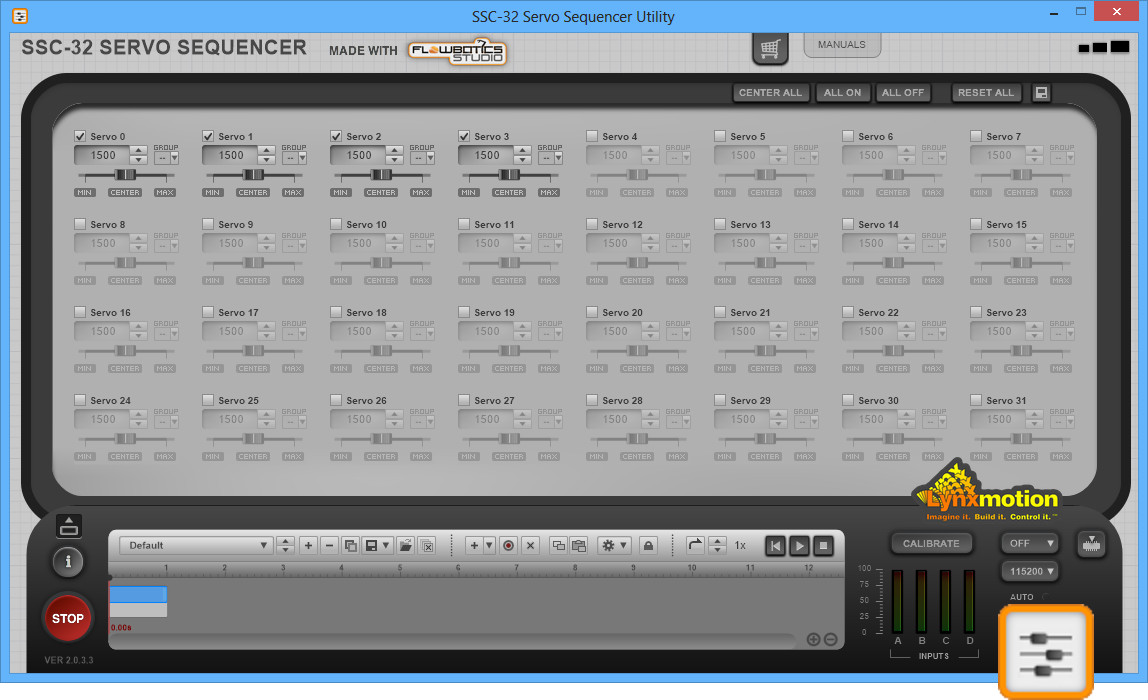
Outil séquenceur pour contrôleur SSC-32 Lynxmotion (créé avec FlowBotics Studio)
Le Contrôleur de servomoteurs SSC-32 Lynxmotion peut être facilement contrôlé avec le nouvel Outil séquenceur pour contrôleur SSC-32 Lynxmotion. Il est disponible comme un outil téléchargeable gratuitement qui rend facile à expérimenter avec la robotique et l'animatronique. Il peut être trouvé dans la section des Liens utiles.
Cet outil est un exemple du type de programme qui peut être construit en utilisant Logiciel de programmation graphique Lynxmotion FlowBotics Studio (Téléchargement) , qui inclut ce programme-ci comme un projet de démonstration open source. L'Outil séquenceur pour contrôleur SSC-32 Lynxmotion vous permet de déplacer facilement les servomoteurs, calibrer leur position, créer et exécuter des séquences de mouvement, mettre à jour le firmware SSC-32 et plus.
- Kit symétrique de châssis
- 2 x Paire de jambe en aluminium à 3 degrés de liberté (noire)
- 4 x Servomoteur standard HS-422 (57 onces/po.)
- 8 x Servomoteur standard HS-645MG (76 once/po)
- BotBoarduino
- Contrôleur de servomoteur
Outil Gratuit
- Outil séquenceur pour contrôleur SSC-32 (créé avec FlowBotics Studio)