





Paiements et sécurité
Vos informations de paiement sont traitées de manière sécurisée. Nous ne stockons pas les informations relatives aux cartes de crédit et n'avons pas accès à ces informations.
Description
- Chien robot quadrupède XGO Mini2 avec un bras robot supplémentaire
- Offre un chien robot quadrupède 12 DOF
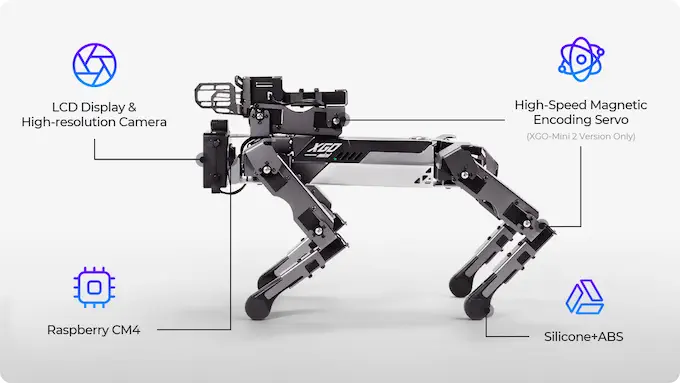
- Comprend un écran LCD et une caméra haute résolution
- Comprend le module Raspberry CM4
- Prend en charge le mouvement omnidirectionnel
- Conception à un bouton et contrôle d'application exclusif
Le XGO Mini2 Quadruped Robot Dog est un robot quadrupède AI de taille bureau avec 12 degrés de liberté et une pince alimentée par Raspberry CM4 pour les applications informatiques de pointe AI, qui peut réaliser un mouvement omnidirectionnel, un contrôle de posture en six dimensions, une stabilité de posture et plusieurs mouvements. allures.
Le XGO Mini2 mis à jour comprend le premier chien robotique de bureau Raspberry Pi au monde avec un bras. Il vous permet de découvrir, d'explorer et de changer votre monde comme jamais auparavant.
Équipé d'une IMU à 6 axes, le capteur de position d'articulation et le capteur de courant électrique de XGO 2 fournissent des informations sur ses propres postures, qui peuvent être utilisées pour la vérification d'algorithmes et le développement secondaire.
Il peut également être programmé par ordinateur à l'aide de Blockly et Python, ce qui en fait l'animal de compagnie en métal idéal pour les amateurs de robots et les passionnés de programmation.

Interaction IA avancée
XGO 2 est équipé de modules d'intelligence artificielle entièrement fonctionnels qui comprennent la reconnaissance visuelle, la reconnaissance vocale et la reconnaissance des gestes, lui permettant d'entendre, de reconnaître et de répondre aux utilisateurs comme un vrai chien.

De plus, il peut décoder les codes QR, analyser l'audio, identifier les émotions, etc. Grâce à la programmation graphique de l'IA edge computing, XGO 2 a la capacité d'exécuter encore plus de fonctions que vous ne le pensez.
Mode d'apprentissage
XGO 2 prend en charge un mode d'apprentissage, lui permettant de mémoriser les positions conjointes de chaque action et d'exécuter le groupe d'actions que vous avez conçu.
Module de calcul Raspberry Pi 4 (CM4)
XGO 2 est alimenté par un Raspberry Pi Compute Module 4 (CM4), qui dispose d'un processeur Quad-Core Cortex-A72 fonctionnant à 1,5 GHz. Il offre une connectivité sans fil avec Wi-Fi double bande 2,4 GHz/5 GHz et Bluetooth 5.0 BLE. Avec 2 Go/4 Go de RAM pour le multitâche et 32 Go de stockage sur carte Micro SD pour le système d'exploitation, XGO 2 offre un temps de démarrage rapide et une expérience utilisateur globale fluide.
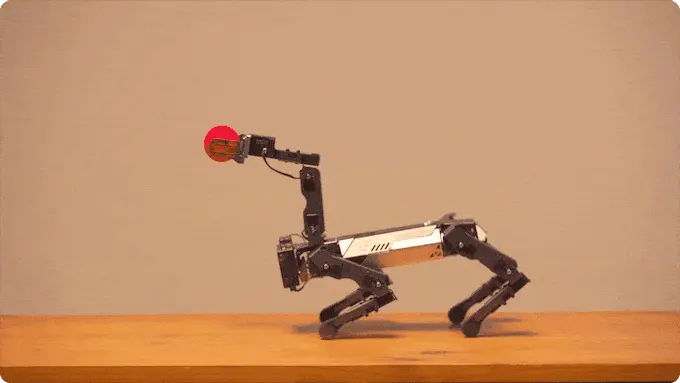
Bras
Avec un servo de bus série de 2,3 kg / 4,5 kg et une pince qui peut s'ouvrir de 2,5 cm à 5,5 cm de large, XGO 2 peut saisir, soulever, transporter, placer et faire glisser une variété d'articles avec ses 3 degrés de liberté bras. Cela ouvre encore plus de possibilités au-delà du simple fait d'être un chien robot quadrupède.
12 degrés de liberté
Équipé de servos série hautes performances, de 12 articulations actives et d'un découplage cinématique, XGO 2 capture véritablement le mouvement et la posture des animaux quadrupèdes. Il peut effectuer un mouvement omnidirectionnel en se déplaçant librement vers l'avant et vers l'arrière, à gauche et à droite, avec une démarche fluide dans toutes les directions.
Auto-stabilisation
XGO 2 dispose également d'un système 6-IMU (unité de mesure inertielle). En utilisant les données d'attitude obtenues à partir de l'IMU et du contrôle en boucle fermée, XGO 2 peut rester stabilisé quel que soit le mouvement de surface.
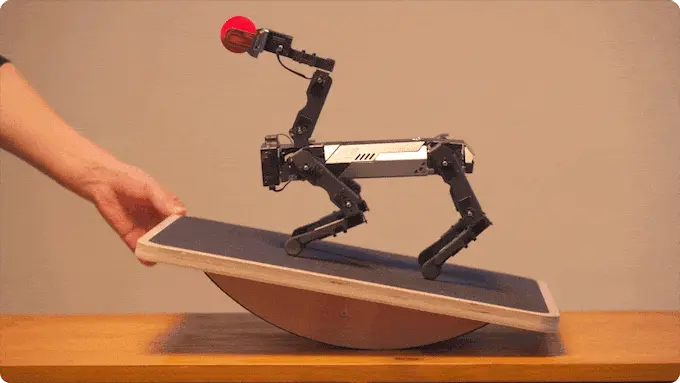
Lorsque ses pieds sont immobiles, le corps entier reste sous six degrés de liberté de contrôle des mouvements, offrant une mobilité et une coordination sans précédent de tous les mouvements instinctifs et sophistiqués.
Planification de mouvement Gaot
XGO 2 est livré avec trois stratégies et règles de marche différentes, qui sont le trot, la marche et la marche haute. Basé sur l'algorithme de cinématique inverse, combiné à l'optimisation de la dynamique de la machine, XGO 2 réalise un contrôle de mouvement omnidirectionnel basé sur la démarche de trot, un contrôle de mouvement à douze degrés de liberté du corps et prend en charge le contrôle superposé de l'attitude et du contrôle de mouvement.
Programmation
Propulsé par Raspberry CM4, le XGO 2 est open source, permettant aux utilisateurs de le programmer à l'aide de Blocky et Python. De plus, il est livré avec des packages Robot Operating System (ROS) pour les développeurs. Que vous soyez un programmeur débutant ou expérimenté, vous pouvez utiliser ou apprendre à programmer le XGO 2 en toute simplicité.
En collaboration avec ELECFREAKS, XGO 2 peut également fonctionner avec micro:bit et Pico:ed. Appréciez le plaisir d'apprendre et de créer vous-même des fonctionnalités intéressantes ! XGO-Mini 2 peut également être étendu en mettant LiDAR LD06 à l'arrière ou OAK-D-Lite sur le bras.
- 1 x chien robot XGO-Mini2
- 1 x chargeur 8,4 V 1 A
- 1 x câble micro-USB
- 1 x manuel d'utilisation
Taille
- 270 x 150 x 180 mm (L x l x H)
Fichier PDF
Site Web
- Hôte : Raspberry CM4 4 Go SDRAM
- Programme : Blocky, Python, ROS
- Alliage IA 1,5 mm
- Poids : 915 grammes
- Servo: 15x 6 V 4.5 kg Seriel Bus Servo
- Jambe et pied : Silicone, ABS
- Client : ESP32
- Batterie : 18650 2S 3500mah
- Chargeur : 8,4 V 1 A
- Autonomie : 2h