
Description
- Unitree Dex3-1 Main Tactile pour Unitree H2 (droite)
- Offre une main à trois doigts avec 7 degrés de liberté
- Conçue pour une opération polyvalente
- Dotée d'un contrôle hybride force-position
- Fournit à la fois sensibilité et fiabilité
La Unitree Dex3-1 Main Tactile pour Unitree H2 (droite) est une main robotique hautement habile, contrôlée par puissance, conçue pour une opération polyvalente. Dotée d'un contrôle hybride force-position, elle offre à la fois sensibilité et fiabilité, permettant une manipulation précise des objets.

La Dex3-1 est une main à trois doigts avec 7 degrés de liberté et 7 axes de mouvement indépendants : six articulations à entraînement direct sans balais à contrôle de force et une articulation à entraînement par engrenages sans balais à contrôle de force. Équipée de 33 capteurs tactiles, elle offre un retour d'information détaillé pour un contrôle avancé. Elle peut être associée au robot humanoïde Unitree G1 pour exécuter une large gamme de tâches complexes.
- 1x Unitree Dex3-1 Main Tactile pour Unitree H2 (droite)
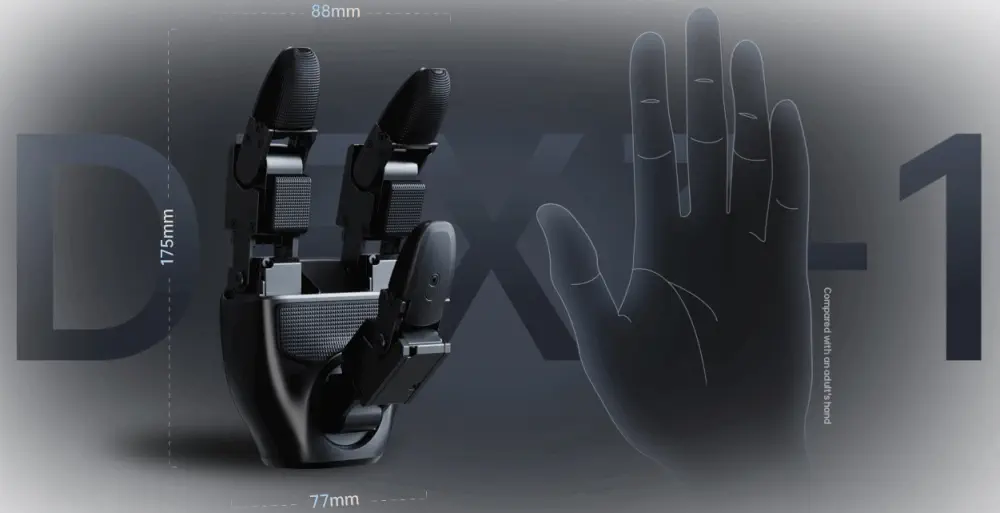
- 88 x 77 x 175 mm (L x L x H)
- Degrés de liberté
- Pouce x3
- Index x2
- Majeur x2
- Mécanisme de transmission
- 6 moteurs entraînent directement
- 1 moteur entraîne avec des engrenages
- Angle de l'articulation
- Articulation du pouce 0 : -60°~60°
- Articulation du pouce 1 : -35°~60°
- L'articulation du pouce 2 : 0 à 100°
- Articulation de l'index 0 : 0 °~90°
- Articulation de l'index 1 : 0 °~100°
- Articulation du majeur 0 : 0 °~90°
- Articulation du majeur 1 : 0 °~100°
- Précision de repositionnement du bout des doigts : ±2 mm
- Tension de fonctionnement : 12 ~ 58 V
- Courant statique : 58 V à 0,2 A
- Courant maximum : 10 A
- Interface de communication : USB 2.0
- Plage de température de fonctionnement : -20 °C ~ 60 °C
- Conditions de charge (paume vers le bas à température ambiante, saisissant un objet dur rond de 5 cm)
- Le poids maximum est de 500 g
- La puissance maximale est : 400 W à 3 s
- Condition de charge (paume vers la gauche à température ambiante, saisissant un objet dur rond de 5 cm)
- Le poids maximum est de 500 g
- La puissance maximale est : 400 W à 3 s
- Nombre de capteurs de pression : 9 (total de 33 capteurs de pression)
- Résolution de l'array
- 2x2 (paume) x3
- 2x2 (Pad de doigt unique) x3
- 3x1 (bout de doigt unique) x3
- Plage de perception : 10 g - 2500 g
- Acceptation maximale (non endommagée) : 20 kg
- Vitesse de communication : 1000 Hz
- Le nombre d'octets dans un paquet complet
- Émetteur : 1234 octets
- Récepteur : 1270 octets
- Retour perceptuel : Mode de l'articulation, Position de l'articulation, Vitesse de l'articulation, Couple de l'articulation, Température de l'articulation, Tension et courant, Valeur de pression du capteur, Valeur de température du capteur, Données imu
- Retour de contrôle : Mode de l'articulation, Position de l'articulation, Vitesse de l'articulation, Couple de l'articulation, Coefficient de rigidité de l'articulation, Coefficient d'amortissement de l'articulation
- Poids : 710 g