









Description
- ROBOTIS OpenMANIPULATOR-P RM-P60-RNH Manipulateur Open Source
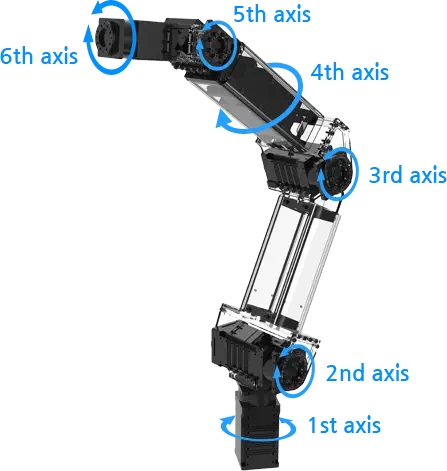
- Caractéristiques des actionneurs DYNAMIXEL PRO+ de la série H (6-DOF)
- Conception légère pour une installation et une mobilité faciles
- Structure modulaire pour une extensibilité et une maintenance faciles
- Gère les charges utiles adaptées aux opérations de petite à moyenne taille
- Optimisé pour les opérations répétitives et très précises
- Communication : RS-485
Le manipulateur Open-Source ROBOTIS OpenMANIPULATOR-P RM-P60-RNH est basé sur ROS et OpenSource. Les utilisateurs peuvent également le contrôler plus facilement en le reliant à MoveIt! emballer. Même si vous n'avez pas de robot réel, vous pouvez contrôler le robot dans le simulateur Gazebo.
L'OpenMANIPULATOR-P (RM-P60-RNH) est composé de DYNAMIXEL-P. DYNAMIXEL a une forme modulaire et adopte la méthode daisy chain. Il permet aux utilisateurs d'ajouter ou de supprimer facilement des joints pour leur propre usage. SDK avec moteur cinématique fourni (exemples : FK, IK, contrôle de profil).
- 1 x manipulateur Open-Source ROBOTIS OpenMANIPULATOR-P RM-P60-RNH
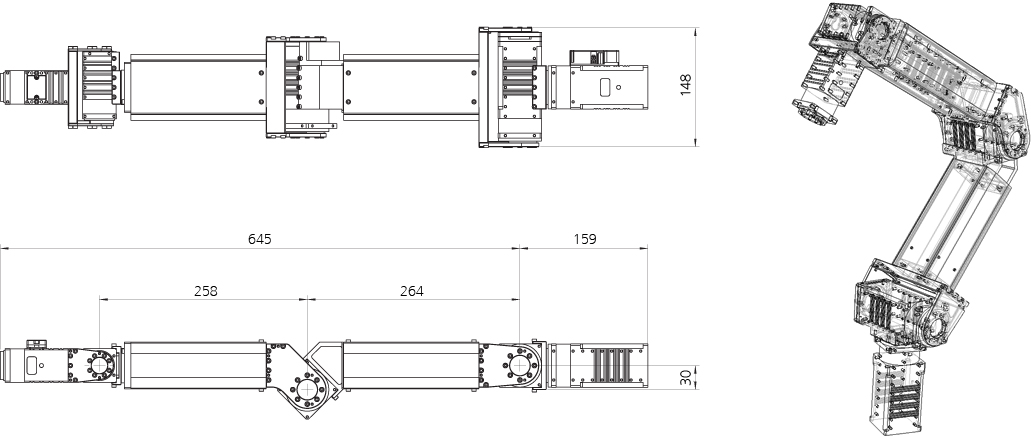
Taille
- Portée : 645 mm
- Répétabilité : ±0,05 mm
- DDL : 6
- Charge utile : 3 kg
- Vitesse (chaque joint): 180°
- Tension nominale : 24 V CC
- Communication : RS-485 (bus multipoint)
- Puissance du moteur/articulation : 200 W/2ea | 100 W / 2ea | 20W / 2ea
- Actionneurs : H54P-200-S500-R x2 | H54P-100-S500-R x2 | H42P-20-S300-R x2
- Logiciel : ROS (Ubuntu Linux)
- Contrôleur : PC (non inclus)
- Poids : 5,5 kg