







Description
- Lynxmotion SES-V2 Bras Robotique (4 DoF) avec Servos Intelligents Assemblé
- Conçu pour l'éducation STEM et la robotique de loisir
- Conception modulaire avec des pièces en aluminium, fibre de carbone et G10
- Utilise les moteurs Lynxmotion Smart Servo (LSS)
- Lynxmotion Logiciel FlowArm LSS pour Bras Robotique - Téléchargement Gratuit
- Support pour Robot Operating System 2 (ROS2)
- Assemblé, version kit disponible Lynxmotion SES-V2 Bras robotique (4 DoF) avec Kit Smart Servos
Note : Les coques esthétiques ne sont plus disponibles.
Le Lynxmotion SES-V2 Bras Robotique (4 DoF) avec Servos Intelligents Assemblé est la 6ème génération de bras robotique articulé de Lynxmotion. Cette version assemblée est destinée comme une version de loisir / échelle d'un bras robotique industriel et est conçue autour des moteurs Lynxmotion Smart Servo entièrement configurables et du système de construction modulaire Lynxmotion Servo Erector Set (SES v2).
 avec Smart Servos Assemblé")
Cette configuration polyvalente facilite la personnalisation et l'expansion pour les applications grâce à l'utilisation de supports supplémentaires, d'électroniques, de capteurs et plus encore, et ajouter des degrés de liberté supplémentaires ou changer la pince est simple.
 avec Smart Servos Assemblé")
Bras Articulé LSS avec et sans coques
Note : Les coques esthétiques ne sont plus disponibles.
Bien adapté pour une utilisation sur un bureau pour le développement et l'expérimentation, le bras peut être facilement monté sur un robot mobile et alimenté par une batterie LiPo 3S (11,1V) (vendue séparément) avec connecteur XT60. La carte électronique LSS Adapter incluse facilite la connexion à une carte compatible avec un bouclier Arduino, Raspberry Pi, XBee ou autre appareil série.
 avec Smart Servos Assemblé")
Bras Articulé LSS sur une plateforme mobile Lyxmotion
Les fichiers de conception CAO, ainsi que des exemples utilisant Arduino et Python sont disponibles pour que les étudiants et les amateurs puissent intégrer le bras dans leurs projets. L'interface utilisateur graphique, LSS FlowArm (créée avec FlowBotics Studio) rend l'enregistrement et la lecture de séquences sans effort.
 avec Smart Servos Assemblé")
Interface utilisateur graphique LSS FlowArm
Les moteurs Lynxmotion Smart Servo ont été conçus et optimisés pour les articulations robotiques et la facilité d'utilisation. Le protocole de communication LSS personnalisé est lisible par l'homme, utilise le duplex intégral (lignes Tx et Rx dédiées) et des débits en bauds sélectionnables. Optimisez le mouvement en modifiant les propriétés de chaque servo ; de la définition d'une vitesse maximale ou d'une plage angulaire à l'accélération angulaire, la rigidité de maintien et plus encore. Chaque servo peut être interrogé pour une grande variété de valeurs en temps réel ou de paramètres configurés, y compris le retour de capteur de l'encodeur absolu (position, vitesse et plus), le courant, la tension et la température.
LSS-ROS2-Arms est un package ROS entièrement open-source qui permet de contrôler un bras SES V2 physique ou simulé (version 4DoF ou 5DoF).
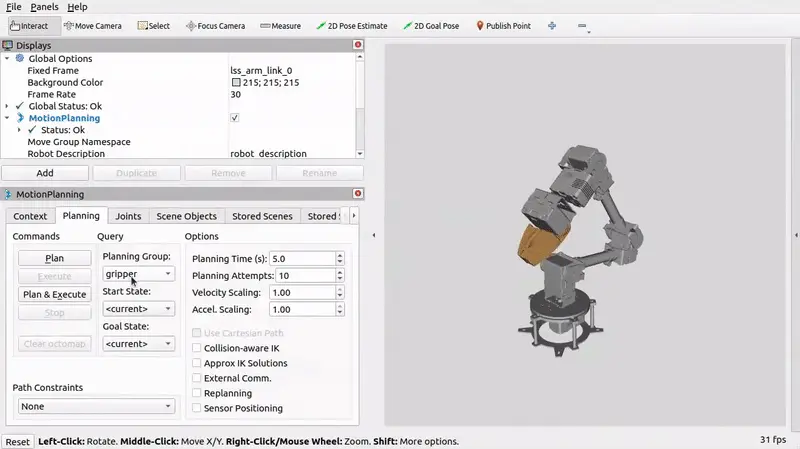
Exemple de Bras Robotique SES-V2 ROS2
Caractéristiques
- 5x moteurs servo intelligents modulaires entièrement configurables
- Supports modulaires en aluminium, tubes en fibre de carbone et plus
- Pince en V s'ouvre de 0 à 180 degrés
- Compatible avec l'électronique Lynxmotion Servo Erector Set
- Créez des séquences en utilisant le mode d'apprentissage manuel, les coordonnées, le bras virtuel
- Fonctionnalités de sécurité intégrées (surintensité, température, tension)
- Protocole de communication LSS facile à comprendre et lisible par l'homme
- 3 x Actionneurs LSS ST1
- 2 x Actionneur LSS HT1
- 1 x Adaptateur LSS (interface électronique)
- 1 x Adaptateur mural 12V avec interrupteur marche/arrêt
- 1 x Câble USB
- Tous les supports, composants de cadre et hardware nécessaires
- Tournevis (Phillips PH1, PH2)
- Portée: 15.819" / 401.80mm
- Rotation: 360 ° / Limité par le câble
 avec Smart Servos Assemblé")
- Axes: 4 degrés de liberté + 1 (pince)
- Portée horizontale maximale: 15.819" / 401.80mm
- Portée verticale maximale: 19.808" / 503.12mm
- Charge utile: 100g (portée maximale)
- Alimentation: 110V à 240V AC 50 / 60Hz AC (prise de type A américaine)
- Alimentation: 12V, 6A DC avec connecteur XT60
- Poids: 1,43 livres / 0,650 kg
Actionneurs
| Emplacement | Type | Couple statique | Vitesse maximale |
| Base | ST1 | 14 kg-cm | 360 ° / s |
| Épaule | HT1 | 29 kg-cm | 360 ° / s |
| Coude | HT1 | 29 kg-cm | 360 ° / s |
| Poignet | ST1 | 14 kg-cm | 360 ° / s |
| Pince | ST1 | 14 kg-cm | 360 ° / s |
Notez que lorsque vous utilisez des tensions plus basses, le couple et la vitesse sont réduits.
Autres produits Lynxmotion