







Inclus dans ce forfait
- 1 X RB-Lyn-739 - Kit Robot Hexapode A-Pod Lynxmotion (Matériel Seulement)
- 25 X RB-Hit-29 - Servomoteur HS-645MG Hitec
Description
- Kit robot hexapode basique A-Pod avec structure, matériel et servomoteurs
- Jambes angulaires pour une plage de mouvements supplémentaires avec 3 DOF (degrés de liberté)
- Constitué de supports en PVC et en aluminium de haute qualité du kit de montage des servomoteurs
- Comprend des pièces en aluminium et en plastique très résistantes
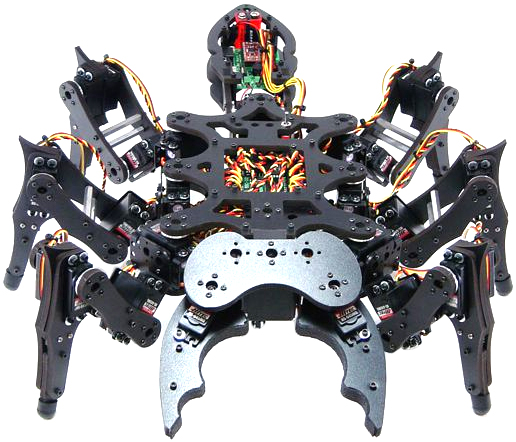
Le Kit robot hexapode A-Pod de Lynxmotion (sans électronique) s'inspire des insectes. Les jambes angulaires procurent une gamme de mouvements supplémentaires. La conception des jambes à trois DOF (degrés de liberté) signifie que le robot peut se déplacer dans toutes les directions. Le robot a été conçu pour utiliser 18 servomoteurs HS-645 pour les jambes et 7 servomoteurs supplémentaires pour la tête et la queue. C'est réellement impressionnant de le voir en action.

Contrôle du robot
En déchargeant le servomoteur de la génération des impulsions et de la séquence de synchronisation des mouvements vers le SSC-32 (fortement recommandé pour les robots multi-jambes), le microcontrôleur dispose de beaucoup de puissance pour faire des choses vraiment sympas. Le programme Phoenix est compatible avec le BotBoardduino et permet au robot de marcher à vitesse variable, dans tous les sens (déplacement), ou de tourner sur place (rotation), ou toute combinaison des deux. Le lever les jambes et la garde au sol sont réglables ainsi que l'allure de la marche. Vous pouvez faire pivoter le corps sur tous les axes. Il dispose de modes de marche et d'allures préréglés parmi lesquels choisir. Tous sont accessibles à partir du contrôleur. Le code Phoenix supporte également un mode de contrôle série pour contrôler le robot via une connexion série.
La mécanique
Le robot est constitué de supports de kits de montage de servomoteurs en PVC découpé avec précision et en aluminium de haute qualité ultra résistant.
- Kit châssis A-Pod
- Kit mandibules A-Pod
- Kit queue A-Pod
- 3 x Paire de jambes A-Pod
- 6 x Câble d'extension pour servomoteur de 15,24 cm
- 1 x Câble d'extension pour servomoteur de 60,96 cm
- 25 x Servomoteur standard HS-645MG (9,58 kg/cm)
Nécessite (vendu séparément)
- BotBoarduino ou autre microcontrôleur
- Contrôleur de servomoteur SSC-32
- Câble USB pour transfert de données
- Dimensions (globales) : 61,60 cm (L) x 43,18 cm (l) x jusqu'à 21,59 cm (h)
- Dimensions (châssis) : 23,81 cm (L) x 16,83 cm (l) x 6,35 cm (h)
- Poids (avec/sans batterie) : 2,83 kg
- Contrôle des mouvements des servomoteurs : boucle locale fermée
- Direction : différentielle
- Nombre de jambes : 6
- Degrés de liberté par jambe : 3
- Vitesse des mouvements : 25,4 cm/s
- Garde au sol : jusqu'à 19,05 cm
Compatibilité des options d'alimentation :
- Chargeurs : chargeurs intelligents universels NiCad et Ni-MH
- Batterie : ensemble batterie de 1 600/2 800 mAh Ni-MH de 6 V