













Description
- LimX Dynamics TRON 2 EDU Robot modulaire 3-en-1 (US)
- Trois configurations librement interchangeables : Manipulation à deux bras, Jambes à roues, et Locomotion bipède seule
- Deux bras 7-DoF avec une charge utile combinée de 10 kg et une latence de téléopération VR de 100 ms via Oculus Quest 3
- Module de calcul AI Intel Core i7-1165G7 avec 2 To de stockage et prise en charge complète de ROS1/ROS2
- Perception RGB-D multi-position à la tête, à la taille et au poignet avec couverture complète par caméra
- Plateforme VLA native avec plus de 10 000 ensembles de données réels open-source et modèles classiques ACT/Pi 0.5
- SDK Python et C++ compatible avec les simulateurs NVIDIA Isaac Sim, MuJoCo, et Gazebo
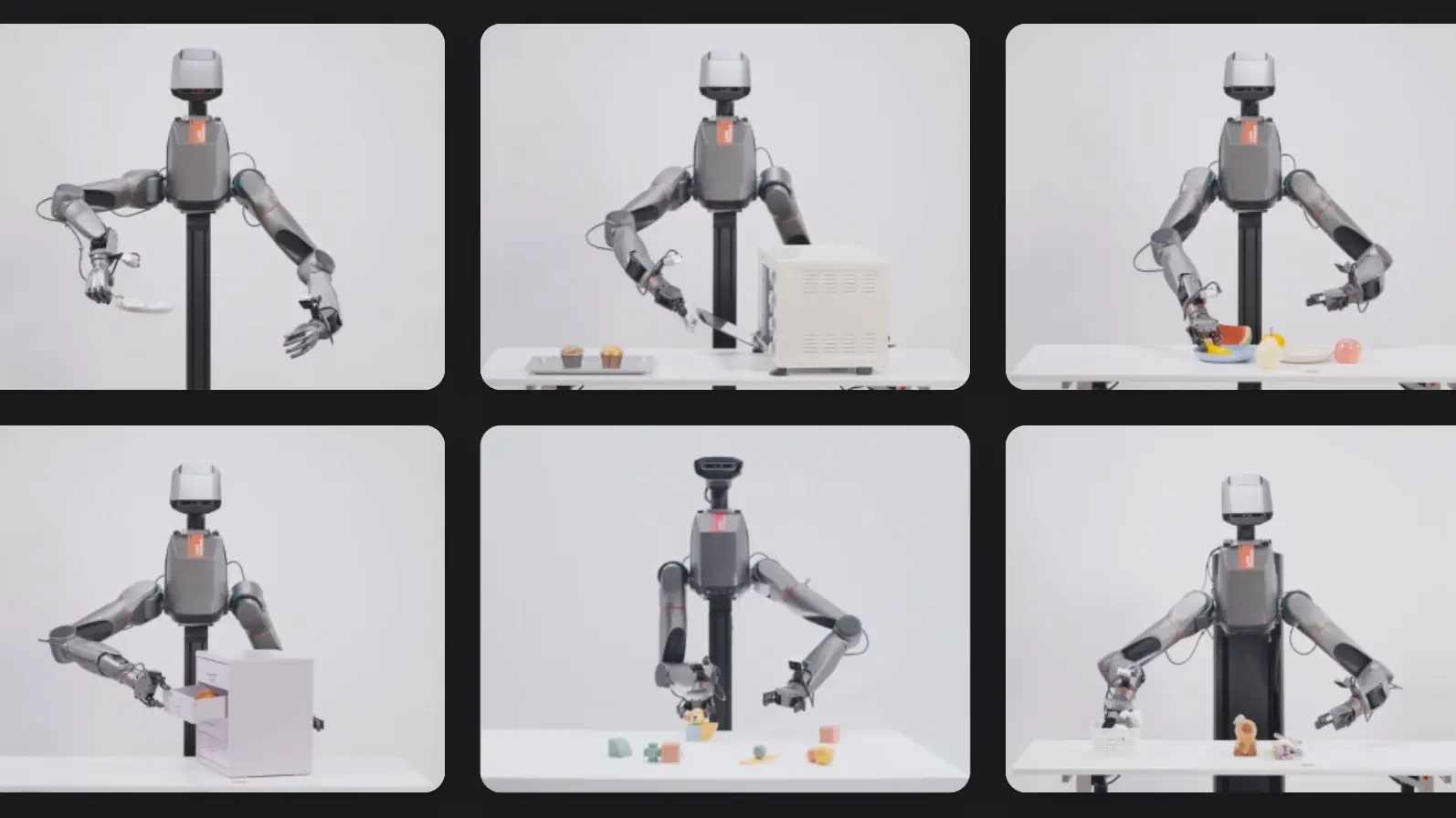
Le LimX Dynamics TRON 2 EDU Robot modulaire 3-en-1 (US) est une plateforme de recherche robotique modulaire multi-formes développée par LimX Dynamics qui combine une manipulation à deux bras haute performance avec une locomotion mobile tout-terrain à travers trois configurations matérielles librement interchangeables. Construite sur un système central partagé unique, la plateforme permet aux équipes de recherche et aux organisations d'ingénierie d'opérer en configurations à deux bras, jambes à roues, et bipède seul sans nécessiter de plateformes matérielles séparées pour chaque domaine de capacité. Le système à deux bras dispose de bras 7-DoF de précision avec un design de poignet sphérique pour une couverture de l'espace de travail à large portée, associé à une protection active des limites de sécurité et un design d'alimentation doublement redondant pour une opération fiable de longue session. La plateforme est spécialement conçue pour les laboratoires de recherche en robotique avancée, les programmes d'ingénierie universitaire, et les équipes de développement d'IA incarnée opérant dans des conditions réelles variées.
La conscience spatiale est assurée par une disposition de capteurs RGB-D en couches positionnée à la tête, à la taille et au poignet, fournissant une entrée de perception complète pour le retour de manipulation et la planification de navigation mobile à travers toutes les configurations. La téléopération à deux bras basée sur la VR permet un contrôle à distance intuitif avec une faible latence, soutenant l'enregistrement structuré de démonstrations pour les flux de travail de recherche en apprentissage par imitation et renforcement. La plateforme de développement VLA tout-en-un intégrée consolide l'acquisition de données, l'annotation, l'entraînement de modèles, et l'inférence de tâches en une seule interface, avec une grande bibliothèque de jeux de données réels open-source et de modèles classiques préchargés disponibles dès le premier jour. Avec un SDK entièrement ouvert, une compatibilité ROS1/ROS2, et un support validé pour les environnements de simulation grand public, cette plateforme robotique autonome est conçue pour les chercheurs en IA incarnée, les laboratoires universitaires, et les organisations de développement industriel construisant des solutions robotiques de nouvelle génération.

Produits authentiques avec couverture de garantie approuvée par le fabricant.

Douanes, inspection, et préparation gérées localement avant expédition.

Ventes, support, et retours gérés par une seule équipe.

Docs, tutoriels, et réponses communautaires pour avancer plus vite.



Une plateforme modulaire offre la manipulation des bras, la traversée à haute vitesse sur roues, et la locomotion bipède avec une pile de développement AI complète pour la recherche en robotique incarnée.
Les caméras RGB-D aux positions de la tête, de la taille, et du poignet fournissent une couverture spatiale complète à travers les trois configurations. La détection de profondeur multi-point permet une perception précise lors des tâches de manipulation et de navigation sur le terrain.
La plateforme intégrée couvre le flux de travail de recherche complet, de la collecte de données et l'annotation à l'entraînement et l'inférence de modèles dans une seule interface. Plus de 10 000 ensembles de données réels open-source et modèles classiques ACT et Pi 0.5 préchargés sont disponibles dès le premier jour.
La téléopération à deux bras via Oculus Quest 3 offre une opération à distance intuitive à travers l'espace de travail complet des bras avec une faible latence. La protection active des limites de sécurité pour les environnements de tête, de corps, de support, et de bureau empêche les contacts non intentionnels pendant les sessions téléopérées.
L'accès complet au SDK Python et C++ expose à la fois les interfaces de contrôle de haut niveau et de bas niveau avec compatibilité ROS1 et ROS2. La plateforme est validée avec NVIDIA Isaac Sim, MuJoCo, et Gazebo et reçoit des mises à jour continues via GitHub.


| • | Corps Principal TRON2 (comprend deux bras supérieurs) |
| • | Extrémités de Bras Inférieur TRON2 ×2 (comprend deux pinces, expédiées en position fermée) |
| • | Unité de Tête TRON2 (comprend câbles d'Alimentation, de Données, et USB 3.2 pour Caméra) |
| • | Extrémités de Pied Bipède ×2 (comprend jambes inférieures) |
| • | Extrémités Bipèdes à Roues ×2 (comprend jambes inférieures) |
| • | Caméra de Poignet D405 ×2 (pour manipulation de précision) |
| • | Support de Caméra D405 ×2 (supports de montage au poignet) |
| • | Câble de Données D405 ×2 (transmission de données à haute vitesse) |
| • | Batterie TRON2 (batterie intelligente haute capacité) |
| • | Adaptateur d'Alimentation (unité principale de charge) |
| • | Station de Charge de Batterie (chargeur de bureau externe) |
| • | Contrôleur à Distance (unité de contrôle sans fil) |
| • | Câble de Charge du Contrôleur |
| • | Kit Oculus Quest 3 — préconfiguré pour Téléopération (casque, 2 contrôleurs, câbles, et adaptateur) |
| • | Module d'Extension Dev (pour intégration de hardware/capteurs) |
| • | Kit d'Outils 3-en-1 (vis, clés, et outils d'installation) |
| • | Cage de Protection TRON2 (cadre protecteur avec cordon) |
| • | Manuel d'Utilisateur & Certificat de Qualité |
| • | Support Fixe à Double Bras (corps principal + matériel d'installation, boîte supplémentaire) |
| • | Base Fixe à Double Bras (corps principal + matériel d'installation, boîte supplémentaire) |
Le contenu du paquet varie selon la configuration. Confirmez le contenu final de la boîte avec les ventes avant de commander.
| • | 70 cm par bras |
| • | 7 |
| • | 85 mm (3,35 in) |
| • | 2 |
| • | 20 cm (7,9 in) |
| • | 5 |
| • | 20 cm (7,9 in) |
| • | 5 |
La hauteur, le poids et l'empreinte globale du corps varient selon la configuration active. Les valeurs indiquées proviennent de la référence du fabricant. Contactez les ventes pour obtenir les dimensions physiques complètes pour votre cas d'utilisation spécifique.