













Description
- LimX Dynamics TRON 2 EDU Robot modulaire 2-en-1 (US)
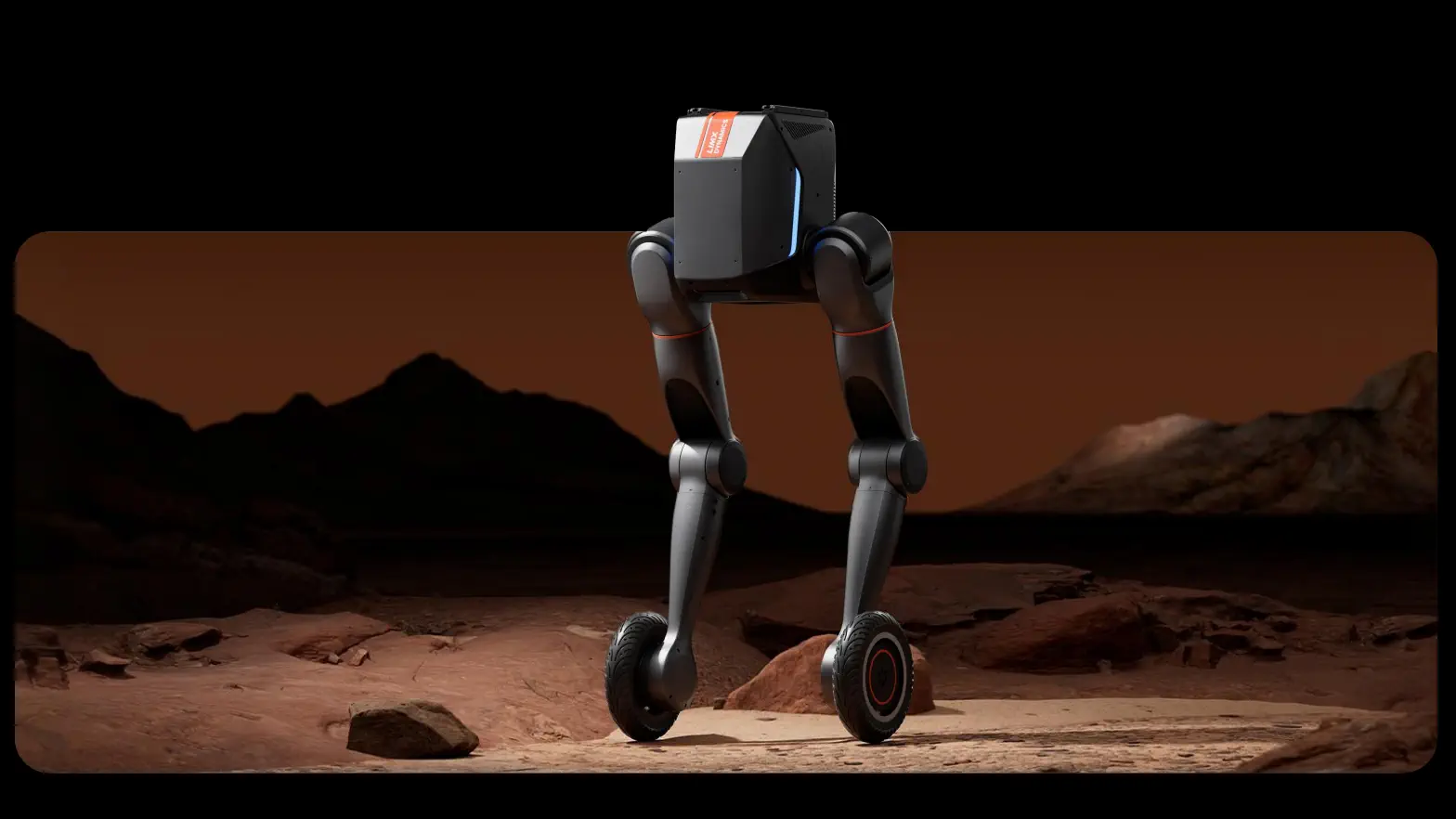
- Deux modes de locomotion interchangeables : Jambes Roues pour un déplacement à grande vitesse et Semelle pour monter des escaliers en mode bipède
- Le mode Jambes Roues supporte jusqu'à 5 m/s de vitesse, une inclinaison de 30° et une charge utile au sol de 30 kg
- Le mode bipède Semelle gère les escaliers et les inclinaisons de 15° avec une hauteur de marche jusqu'à 20 cm
- Module de calcul AI Intel Core i7-1165G7 avec 2 To de stockage et prise en charge complète de ROS1/ROS2
- Batterie lithium ternaire 9 Ah interchangeable avec support de recharge automatique en mode Jambes Roues
- SDK Python et C++ compatible avec les simulateurs NVIDIA Isaac Sim, MuJoCo et Gazebo
Le LimX Dynamics TRON 2 EDU Robot modulaire 2-en-1 est une plateforme de locomotion mobile à double mode développée par LimX Dynamics, combinant une mobilité à grande vitesse sur roues avec une capacité de montée d'escaliers bipède dans un système modulaire unique. La configuration Jambes Roues permet un déplacement rapide et stable sur des surfaces planes et inclinées avec une capacité de charge utile au sol substantielle et un support de recharge automatique, ce qui le rend adapté à une opération autonome prolongée dans des environnements de recherche et industriels. Passer à la configuration bipède Semelle active la capacité de monter des escaliers en utilisant une entrée de planification de mouvement visuel, permettant au robot de naviguer dans des environnements à marches que les systèmes à roues ne peuvent pas accéder. La plateforme est conçue pour les équipes de recherche en robotique mobile, les laboratoires d'apprentissage par renforcement et les programmes de déploiement sur le terrain nécessitant une locomotion adaptable à travers divers types de terrains réels.
Une caméra RGB-D montée à la taille fournit l'entrée principale de perception spatiale pour la planification de la navigation et la prise de conscience des obstacles dans les deux modes de locomotion. Le module de calcul Intel embarqué prend en charge l'ensemble du flux de développement VLA, de la journalisation et de l'annotation des données à la formation de modèles et au déploiement de tâches autonomes, le tout au sein de l'interface de la plateforme intégrée. L'accès SDK ouvert en Python et C++ expose à la fois des interfaces de contrôle de mouvement de haut niveau et de bas niveau avec compatibilité ROS1 et ROS2, et la plateforme inclut des modèles URDF clairs validés pour la performance Sim2Real dans NVIDIA Isaac Sim, MuJoCo et Gazebo. Cette plateforme robotique autonome est bien adaptée aux programmes de recherche en locomotion universitaire, aux études de navigation AI incarnée, et aux organisations développant des solutions mobiles multi-terrains pour un déploiement commercial ou industriel.

Produits authentiques avec couverture de garantie approuvée par le fabricant.

Douanes, inspection et préparation gérées localement avant expédition.

Ventes, support et retours gérés par une seule équipe.

Documents, tutoriels et réponses communautaires pour avancer plus vite.



Une plateforme mobile à double mode qui combine la recherche en locomotion tout-terrain avec une pile de développement AI embarquée complète, prête pour la navigation, l'apprentissage par renforcement et le travail de déploiement sur le terrain.
Le mode Jambes Roues offre un déplacement à grande vitesse avec gestion des pentes raides et une capacité de charge utile au sol élevée, tandis que le mode Semelle active la montée d'escaliers bipède en utilisant une entrée de navigation visuelle. Passer d'un mode à l'autre permet à la même plateforme de fonctionner dans des environnements qu'un seul type de locomotion ne peut pas entièrement adresser.
La plateforme embarquée gère l'ensemble du pipeline de recherche depuis l'acquisition et l'annotation des données jusqu'à la formation de modèles et le déploiement d'inférences dans une interface unifiée. Des ensembles de données réels open-source et des modèles classiques sont disponibles dès le premier jour pour les équipes travaillant sur le développement de politiques de navigation et de locomotion.
La détection de profondeur RGB-D montée à la taille et une IMU fournissent une conscience spatiale en temps réel pour la détection d'obstacles et la classification des terrains dans les deux modes de locomotion. Le système gère le sol plat, les inclinaisons et les environnements à escaliers en utilisant la planification de mouvement visuel pour guider le placement des marches dans la configuration Semelle.
Accès complet au SDK Python et C++ avec compatibilité ROS1 et ROS2 prend en charge à la fois le script de tâches de haut niveau et le développement de contrôle de mouvement de bas niveau. Le support validé pour NVIDIA Isaac Sim, MuJoCo et Gazebo permet une recherche en locomotion axée sur la simulation avec des modèles URDF clairs optimisés pour le transfert Sim2Real.



| • | Corps Principal TRON2 (comprend deux bras supérieurs) |
| • | Extrémités de Pied Bipède ×2 (comprend les jambes inférieures) |
| • | Extrémités Roues-Bipède ×2 (comprend les jambes inférieures) |
| • | Batterie TRON2 |
| • | Adaptateur Secteur |
| • | Station de Recharge de Batterie |
| • | Contrôleur à Distance |
| • | Module d'Extension Dev |
| • | Kit d'Outils 2-en-1 (outils d'assemblage spécifiques pour les modules de mouvement) |
| • | Cage de Roulement TRON2 (cadre protecteur avec 2 cordons) |
| • | Manuel d'Utilisation & Certificat de Qualité |
Le contenu du colis varie selon la configuration. Confirmez le contenu final de la boîte avec les ventes avant de commander.
| • | 20 cm (7.9 in) |
| • | 5 |
| • | 2 |
| • | Alliage d'Aluminium et Plastique |
Les dimensions globales du corps varient selon le mode de locomotion actif. Les valeurs indiquées proviennent de la référence du fabricant.