











Description
- Kit robot programmable avec entrainement Mecanum
- Carte Arduino complète intégrée (ATMega328p)
- Quatre ponts en H pour le contrôle indépendant de quatre moteurs
- Régulateur de tension intégré (une seule pile requise)
- Compatible avec différents blindages
- Soudure requise
Le Robot compatible Arduino Rover 2.0 de DFRobotShop est un robot mobile polyvalent basé sur le célèbre microcontrôleur Arduino Duemilanove. Le Rover utilise la très répandue Boîte à Engrenages Double Tamiya . La carte de circuit imprimé DFRobotShop Rover comprend un

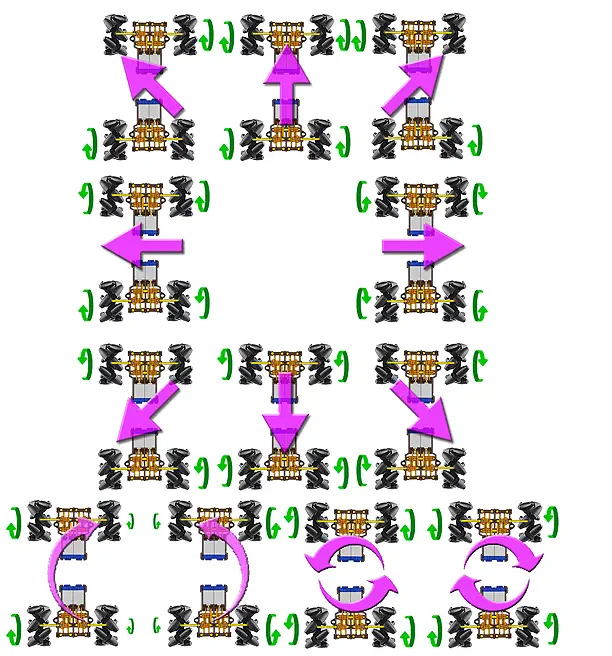
Le Robot compatible Arduino Rover 2.0 de DFRobotShop s'appuie sur le succès de la première génération de DFRobotShop Rover V2 - Robot à Chenilles Compatible Arduino (Kit de Base) et intègre un chargeur LiPo (chargement par USB), une zone de prototypage par soudure, l'emplacement pour un XBee et plus encore. Des roues omni directionnelles Mecanum permettent au Rover de se déplacer dans les directions suivantes :
Les commandes initiales comprendront :
- 1x Contrôleur Robot Rover V2 de DFRobotShop
- 1x
4x Roues Mecanum (Moyeux en Aluminium) 2x Boîte à Engrenages Double Tamiya - 1x Support gauche
- 1x Support droite
- 1x Blindage Controleur de Moteurs
- 2x Encodeurs pour boite engrenages Tamiya
- 2x Quincaillerie DFRobotShop Rover
Fichiers PDF
- Manuel du DFRobotShop Rover
- Schéma du DFRobotShop Rover
- Fiche technique du capteur de lumière
- Dimensions du support métallique du DFRobotShop Rover
- Schéma pour DFRobotShop Rover V2
Site Web
Forum
Fichiers ZIP
Blogue