")
")
")
")
")
")






Payments and Security
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Description
- Programmable Mecanum driven robot kit
- Complete Arduino board built-in (ATMega328p)
- Two dual H-bridges for independent control of four motors
- Onboard voltage regulator (only one battery needed)
- Compatible with a variety of shields
- Soldering is required
- LiPo battery sold separately
The DFRobotShop Mecanum Rover 2.0 – Arduino Compatible Robot is a versatile mobile robot based on the popular Arduino Uno microcontroller. The Rover uses two Tamiya Twin-Motor Gear Box , each with their own pair of encoders, as well as a dual motor controller shield** to control the four Mecanum wheels independently. The DFRobotShop Rover PCB incorporates a standard Arduino Uno (surface mount ATMega328), L293B motor driver (connected to pins 5 to 8), voltage regulator and prototyping area and also doubles as part of the mechanical structural of the robot. The onboard voltage regulator allows the entire board to be powered using as little as 3.7V to ~9V*.

The DFRobotShop Rover 2.0 Arduino Compatible Robot builds upon the success of the first generation DFRobotShop Rover V2 - Arduino Compatible Tracked Robot (Basic Kit) and integrates a LiPo charger (charges via USB), solder prototyping area, XBee footprint and more. Mecanum omni directional wheels allows the Rover to move in the following directions:
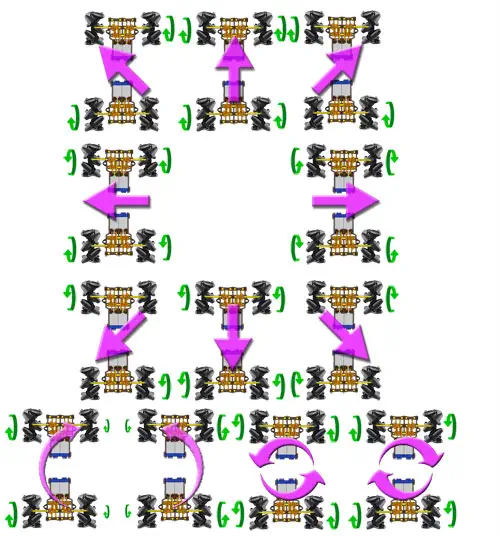
It is important to note that due to the forces involved, some directions are noticeably slower than others. As an example, forward and backward is considerably faster than direct left and right. Rotating CW / CCW about the center point takes longer than in a 2WD rover.
* Motors included with Tamiya gearbox operate at up to 5V. 6V motors are available separately.
** The DFRobotShop Rover PCB incorporates a dual motor controller, and the shield adds a dual controller which uses different pins, allowing you to control four DC motors independently.
- 1x DFRobotShop Rover V2 Robot Controller
- 1x Mecanum Wheel 4 Pack (w/ Metal Hubs) 2x Tamiya Twin-Motor Gear Box
- 1x Left bracket
- 1x Right bracket
- 1x Dual Motor Shield for Arduino
- 2x Encoder pair for Tamiya Twin Motor Gearbox
- 2x DFRobotShop Rover Hardware
LiPo battery sold separately
PDF Files
- DFRobotShop Rover Manual
- DFRobotShop Rover Schematic
- Light sensor datasheet
- DFRobotShop Rover Metal Bracket Dimensions
- DFRobotShop Rover V2 Schematics
Website
Forum
ZIP Files
Blog