Forte résistance aux interférences lumineuses ambiantes
Basse consommation énergétique
Fréquence de balayage : 6 ~ 12 Hz
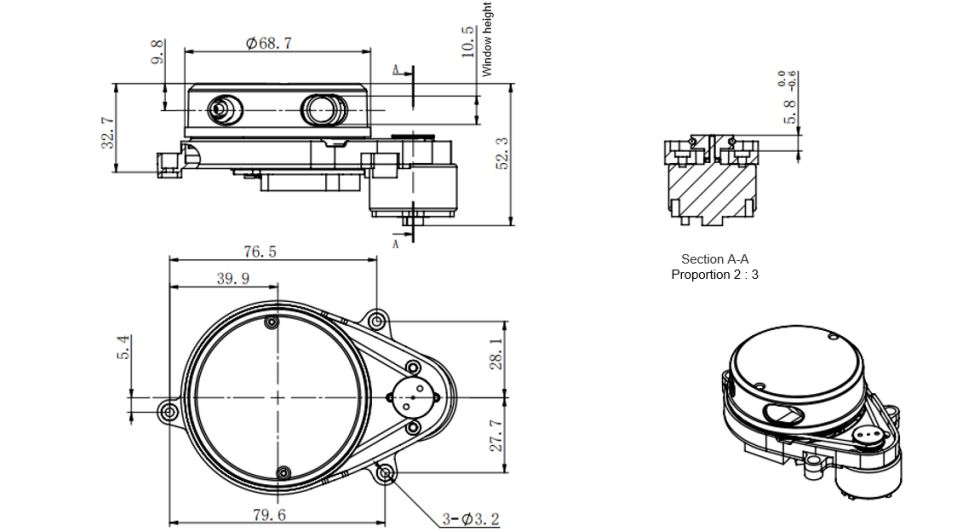
Le télémètre 2D YDLIDAR X4PRO 360 degrés est un télémètre bidimensionnel à 360 degrés (ci-après dénommé X4PRO) développé par l'équipe EAI. Basé sur le principe de la triangulation, il est équipé de l'optique, de l'électricité et de la conception d'algorithmes associés pour obtenir des mesures de distance à haute fréquence et de haute précision. La structure mécanique tourne à 360 degrés pour produire en continu les informations d'angle ainsi que les données de nuage de points de l'environnement de numérisation pendant la télémétrie.
Le X4PRO fournit une interface de prise PH2.0-8P avec des interfaces fonctionnelles pour l'alimentation du système, la communication des données et la commande du moteur. Le X4PRO utilise un port série de 3,3 V (UART) pour la communication duplex et ne prend en charge que la communication unidirectionnelle (Tx) pour la liaison descendante des données. L'utilisateur peut connecter le système externe et le produit via l'interface physique du produit, et communiquer conformément au protocole de communication du système pour obtenir le nuage de points numérisé en temps réel.
X4PRO est un pilote de moteur doté de sa propre fonction de régulation de la vitesse du moteur. M_CTR est le signal de contrôle de la vitesse du moteur, qui peut être utilisé pour la régulation de la vitesse de la tension et le débogage de l'onde PWM. Plus la tension/le cycle de travail PWM est faible, plus la vitesse du moteur est élevée. 0V / Vitesse maximale à 0 % du rapport cyclique.
Applications
Navigation robotisée et évitement d'obstacles
Enseignement et recherche Robot ROS
Sécurité régionale
Numérisation de l'environnement et reconstruction 3D
Navigation et évitement d'obstacles du robot aspirateur/robot d'apprentissage ROS
Si vous n'êtes pas satisfait d'un produit acheté sur le Site, vous pouvez demander un retour dans un délai de 30 jours à compter de la date de livraison, sauf si le produit figure parmi les Exceptions de retour ci-dessous ou est soumis à des conditions de retour particulières indiquées sur la page du produit.
Cette politique de retour s'applique également, comme norme minimale, aux produits vendus et expédiés par des vendeurs tiers via la Marketplace.
Les retours prévus par la présente politique concernent les produits non défectueux. En cas de défaut de fabrication confirmé, les recours sont traités selon les conditions de Garantie, à la discrétion du Vendeur. Consultez la section Garantie.
Conditions de retour
Pour bénéficier d'un remboursement dans le cadre de la politique de retour de 30 jours, toutes les conditions suivantes doivent être remplies :
Un numéro d'autorisation de retour (RA) valide doit être obtenu avant de retourner le produit. Les retours sans numéro RA seront refusés.
Le numéro RA est valable 30 jours. L'article retourné doit être reçu au cours de cette période.
Le numéro RA doit être joint au retour.
Les produits doivent être retournés dans un état neuf et non modifié (par exemple, sans rayures, altérations, pièces manquantes ni traces d'installation ou d'utilisation) et dans leur emballage d'origine, propre à la revente.
Les frais d'expédition ne sont pas remboursables. Les frais de retour sont à la charge du client, sauf en cas de produit confirmé défectueux à l'issue du processus de dépannage de RobotShop ou d'erreur d'expédition avérée de la part de RobotShop.
Les remboursements sont traités dans un délai de 7 jours après réception et inspection de l'article retourné.
Des frais de nettoyage de 100 $ peuvent s'appliquer aux robots domestiques retournés dans un état usagé ou non nettoyé.
Des frais de réapprovisionnement de 20 % peuvent s'appliquer aux retours en grande quantité d'articles commandés spécifiquement pour le client auprès du fabricant ou ne faisant pas partie de l'inventaire standard de RobotShop.
Exceptions de retour
Les produits suivants ne sont pas admissibles à un retour ou à un remboursement dans le cadre de la présente politique :
Produits usagés, endommagés ou modifiés — Articles présentant des signes d'utilisation, d'usure ou d'altération les rendant impropres à la revente.
Consommables — Composants d'usure, altérés ou épuisés par l'utilisation (par exemple, piles, courroies, brosses, engrenages, filament, pneus, sacs jetables, lubrifiants, graisses, cires, etc.). Non admissibles au retour une fois ouverts ou utilisés.
Denrées périssables — Biens susceptibles de se détériorer ou de se périmer rapidement. Non admissibles au retour.
Biens scellés (santé ou hygiène) — Articles scellés pour des raisons de protection de la santé ou d'hygiène (par exemple, masques, gants, produits anti-odeurs). Non admissibles au retour une fois descellés.
Produits à assembler soi-même et articles nécessitant un assemblage par le client — Y compris les robots et kits, les pièces de robot et autres produits nécessitant un assemblage ou une soudure. Non admissibles au retour une fois assemblés, soudés ou installés.
Biens numériques, logiciels et applications — Vente ferme uniquement, en raison des restrictions de licence.
Articles en liquidation — Produits identifiés comme étant en liquidation ou en vente ferme, y compris les articles en fin de vie ou discontinués.
Articles fabriqués sur mesure, personnalisés ou en commande spéciale — Produits fabriqués, configurés, adaptés ou construits selon les spécifications et les exigences propres au client.
Articles sur demande — Produits du catalogue standard non tenus en stock par RobotShop et commandés spécifiquement pour répondre à une demande du client.
Bien que la même politique de retour s'applique, ces commandes nécessitent une procédure de contact distincte pour les retours.
Commandes expédiées par RobotShop → soumettez un ticket d'assistance depuis votre compte, sous Mes tickets d'assistance.
Commandes de vendeurs de la Marketplace → soumettez un ticket depuis votre compte, sous Mes tickets Marketplace, pour contacter directement le vendeur.
Remarque : les produits des vendeurs de la Marketplace portent normalement des SKU commençant par RM et sont identifiés sur la page du produit par la mention « Vendu et expédié par [Nom du vendeur] ».
Vous aimerez aussi
Leader de l'industrie établi
Boutique de robotique de confiance depuis plus de 20 ans