
Description
- Chien Robot IA XGO Mini2s avec Radar, Lidar & Raspberry CM5 (US)
- Capacités IA avancées
- Mouvement précis à 12 degrés de liberté (DOF)
- Contrôle omnidirectionnel polyvalent
- Capteurs de haute précision
- Construction robuste en aluminium
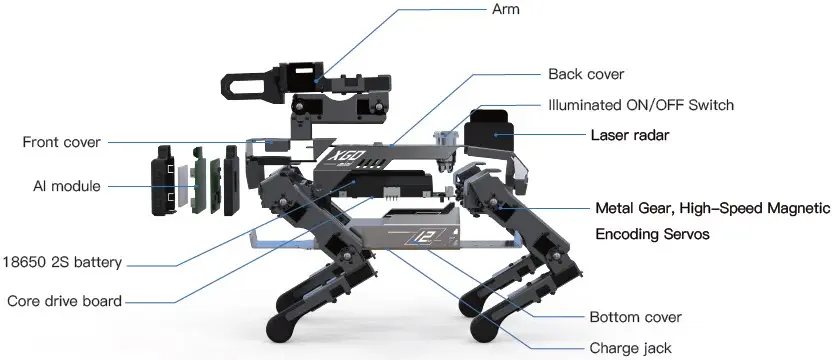
Le Chien Robot IA XGO Mini2s avec Radar, Lidar & Raspberry CM5 (US) est un robot de bureau AI avancé conçu pour servir de plateforme pour les applications informatiques de pointe dans l'intelligence artificielle. Ce chien robot se caractérise par un système à 12 degrés de liberté (DOF) complété par un préhenseur et la technologie Lidar, facilitant un mouvement omnidirectionnel précis et un contrôle de posture en 6D. Sa stabilité de posture et ses diverses allures de mouvement en font un outil polyvalent pour diverses tâches robotiques.
Le XGO Mini2s est équipé d'une Unité de Mesure Inertielle (IMU), de capteurs de position des articulations et de capteurs de courant, qui fournissent ensemble une rétroaction complète sur la position, la rotation des articulations et le couple. Ces caractéristiques permettent au robot d'effectuer des mouvements complexes avec une grande précision.
De plus, le chien robot prend en charge la programmation en Blocky et en Python, permettant aux utilisateurs de développer des applications AI sophistiquées via une application personnalisée ou une interface PC.
- 1x Boîtier de protection
- 1x Corps principal XGO-mini2s
- 1x Chargeur 8.4 V 4 A
- 1x Manuel d'utilisateur XGO-mini2s
- 1x Hub USB Type-C
- 1x Câble Micro HDMI vers HDMI
- 3x Balles colorées
- 3x Cubes
- 270 x 150 x 180 mm (L x L x H)
- Chien Robot Quadrupède à 12 DOF avec préhenseur à 3 DOF
- Raspberry CM5 pour la vision par machine, la reconnaissance vocale, faciale et gestuelle
- Servos à engrenages métalliques avec haute vitesse et couple, roulement à billes, codage magnétique, bus série
- Programmation en Blocky et Python via APP ou PC
- Démarrage rapide, mouvement rapide et fonctionnement silencieux
- Construction en aluminium d'aviation
- Autonomie de 2 heures (selon l'utilisation)
- Entièrement assemblé
- Lidar de petite taille
- Auto-stabilisation de posture IMU
- Contrôle de posture à 6 DOF
- Fonction Déplacer, Enregistrer et Lire
- Interface de communication utilisateur et de programmation secondaire
- Planification de l'allure de mouvement
- Interface de simulation de cinématique et de dynamique
- Contrôle de mouvement omnidirectionnel
- Capacités d'Intelligence Artificielle comme la vision par machine, la reconnaissance faciale, la reconnaissance vocale
- Matériau : Corps en Aluminium d'Aviation
- Jambes en Silicone/ABS
- Écran : 2.0 pouces IPS 320 x 240
- Caméra : deux mégapixels OV5647
- Mic : double MEMS
- Haut-parleur : 8 Ω 3 W
- Carte SD : 32 G
- Poids : 950 g
- Paramètres du module IA
- Broadcom BCM2711
- 4 CPU Cortex A72 1.5 GHz
- Graphiques Open GL ES 3.0
- 4 Touches Programmables
- Micro HDMI
- USB Type-C et PH2.0 4pin
- Paramètres du servo
- Type : Bus Série
- Couple de sortie : 4.5 kg.cm
- Vitesse : 0.1 S/60°
- Précision : 0.01
- Plage de tension de fonctionnement : 4.8 V~7.4 V
- Température de fonctionnement : -20°C~+60°C
- Plage de mouvement : 0~360°
- Type de moteur : Coupe Creuse
- Poids : 20±1 g
- Paramètres du Lidar
- Portée : 0.02 - 12 m
- Fréquence de télémétrie : ≥4500 Hz
- Fréquence de balayage : 5 - 13 Hz
- Angle de balayage : ≥360°
- Paramètres du système d'alimentation
- Tension d'entrée du chargeur : 100-240 V AC 50 / 60 Hz
- Tension de sortie du chargeur : 8.4 V
- Courant de sortie du chargeur : 4 A, avec protection contre les surintensités
- Batterie : 18650 standard 3800 mAh 3C décharge