











Description
- Main robotique qui s'adapte à toutes les pièces
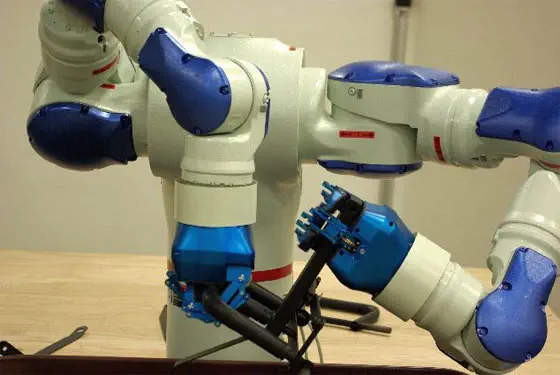
- 3 doigts articulés et 4 modes saisissants se conforme à diverses tailles et formes
- Contrôle simple avec Ethernet/IP, Modbus RTU, DeviceNet ou d'EtherCAT
- Dimensions: 9x9x9 pouces
- Poids : 2.1 kg
La Main Adaptative Robotiq est la première main industrielle habile au monde qui donne aux robots industriels des capacités motrices similaires à une main. Ce qui augmente leurs capacités de manoeuvrer une plus grande variété de pièces, de détecter une prise, et de contrôler la pression sur une pièce. Cette main est centrée sur les applications qui ont une quantité de pièces très élevées à manipuler et ont une complexité dans leur géométrie. On l'utilise pour différentes applications telles que la fabrication, la téléoperation et la recherche.

Fontionnement
- L'intelligence embarquée dans cette pince lui permet de s'adapter automatiquement à la forme de l'objet. Lorsqu'un objet est saisi, un signal est retourné au contrôleur. Ceci est effectué grâce à l'information des moteurs, sans utilisation de capteur de pression.
- La main peut être installée sur une grande variété de bras robotiques, et de robots industriels ou mobiles.
- Selon le robot utilisé, la main vient avec une interface mécanique, le(s) connecteur(s) et le protocole de de communication appropriés.
- La main contient des moteurs électriques mais vous n'avez pas à les contrôler indépendamment. Pour contrôler la main, vous lui envoyez des commandes de haut-niveau.
- Les commandes les plus communes sont "ouverture", "fermeture" (partielle ou complète) et "changer mode de saisie". Pour l'ouverture et la fermeture, un paramètre "vitesse" est spécifié. Pour la fermeture, on peut aussi spécifier un "niveau de force".
- La main peut soulever des objets de 3 kg en pincée et de 10 kg en prises englobantes.

Applications
Manufacture: Lorsque le robot doit saisir un grand nombre de pièces de géométrie différentes. La Main Robotiq est l'outil unique pour saisir, tenir et placer toutes ces pièces différentes.
Avantages
La Main Robotiq est conçue pour les tâches nécessitant la saisie de dizaines voir des centaines de pièces de formes différentes tel que: transfert de pièces, alimentation de machines ou de gabarits, assemblage.
- Un outil unique pour tous ls objets. Élimine la nécessité de modifier différentes pinces et le changement d'outils.
- Main reprogrammable réduisant le délai de mise en marche, le coût et le temps de réaction aux changements d'ingénierie.
- Réduit le coût et la complexité des gabarits.
- Contribue à régler des problèmes d'ergonomie et d'accès pour les opérateurs.
Télémanipulation: Pour une dextérité accrue et un contrôle intuitif.
Bénéfices
Vous utilisez un robot parce que l'environnement est dangereux ou difficile d'accès pour une personne. Augmentez les capacités du robot avec la Main Robotiq.
- S'adapte automatiquement à la forme de l'object. Évite de ramener le robot pour modifier son outil.
- Contrôle intuitif: l'opérateur envoie des commandes "ouvre", "ferme" de haut niveau, la main s'occupe du reste.
- Dextérité accrue grâce aux quatre modes de saisie, à la vitesse et à la force ajustables.
- Grâce à ses trois doigts articulés, la main peut entourer les objets dangereux pour des prises sécuritaires. Elle peut même utiliser des outils communs comme un couteau ou une petite pelle.

Recherche: Pour la recherche en manipulation dans les environnments non-structurés.
Bénéfices
- La main s'adapte automatiquement pour saisir les objets sans nécessiter de contrôle complexe. Vous vous concentrez sur votre recherche, la main s'occupe de saisir.
- La main fournit une rétroaction sur l'état de la saisie pour vous permettre d'ajuster le mouvement du robot en conséquence.
- Trois doigts à trois phalanges chacun, quatre modes de saisie, vitesse et force ajustables pour accroître les capacités de manipulation de votre robot.
- La main est aussi utilisée en milieu industriel où elle doit tenir le coup. Vous bénéficiez de la même robustesse.

Intégration
La Main Adaptative Robotiq peat être installer sur tous les robots industriels
- Nous configurons la Main Robotiq à votre robot pour une intégration rapide. Elle vous est livrée avec la plaque d'interface mécanique, le(s) connecteur(s) et le protocole de communication appropriés.
- Vous installez la main sur le robot à l'aide de vis et vous branchez le(s) connecteur(s).
- Avec la liste de commandes que nous fournissons, vous programmez la main. Pour une pièce donnée, vous spécifiez le mode de saisie, la vitesse et la force de saisie.
- La main retourne l'information sur la prise au contrôleur.
- Si une grande précision de positionnement de la pièce est requise, vous pourrez utiliser la main avec un système de vision ou un capteur d'efforts au poignet.
- Main Adaptative Robotiq
- Câbles pour alimentation et communication
- Dimensions: 9x9x9 pouces
- Poids : 2.1 kg
Mécanique
- Ouverture de la main: 1-155mm
- Poids de la main: 2.3kg
- Force de prise d'englobement recommandé: 10kg
- Force de prise de friction recommandée (bout des doigts): 2.5kg
- Max couple de prise (bout des doigts): 15-60N
- Max couple pour relâcher: 100N
- Max vitesse de fermeture: 110mm/sec
- Min. température ambiante : -10°C
- Max. température ambiante : 50°C
- Repétabilité position des doigts (bout des doigts): 0.05mm
- Nombre de doigts: 3
- Nomdre de phalanges par doigt: 3
- Nomdre de modes de prises: 4
- classe IP : 31
Contrôle
- Options interface : Ethernet/IP, Modbus RTU, Modbus TCP/IP, DeviceNet, CANopen ou EtherCAT
- Paramètres de prise programmable: Force, vitesse et ouverture et fermeture partielle
- LEDs pour status: En marche, communication et erreur
- Rétroaction : Détection de contact des doigts
Électrique
- Voltage: 24VDC
- Puissance inactif: 4.1W
- Alimentation courant maximum RMS: 1.4A
- Puissance Max.: 36W