





Description
- Robot Power Open Source Motor Control 160A, 13-50V
- Fournit un courant continu robuste de 160A, avec des pointes dépassant 400A
- Prend en charge une tension d'alimentation de 13-50V, tension nominale maximale de la batterie 36V
- Inclut un ventilateur de refroidissement pour une dissipation efficace de la chaleur
- S'adapte pour une interface facile avec un microcontrôleur
- Permet l'utilisation d'unités parallèles pour une capacité >300A
Le Robot Power Open Source Motor Control 160A, 13-50V est un circuit en pont en H robuste spécialement conçu pour contrôler les moteurs à courant continu à aimant permanent. Initialement conçu pour les compétitions de combat de robots, ses caractéristiques le rendent adapté à une variété d'applications commerciales et industrielles de contrôle de moteur. Ce contrôleur de moteur est capable de piloter une large gamme de moteurs et d'autres charges, et il est conçu pour un montage et une interface faciles avec diverses unités de microcontrôleur. Son design permet des modifications ou réparations simples si nécessaire.
Cette unité de contrôle de moteur fonctionne sans dissipateur thermique lourd, utilisant à la place un ventilateur de refroidissement pour dissiper efficacement la chaleur des MOSFETs. Le ventilateur, un ventilateur de refroidissement d'ordinateur standard de 80 mm carré, peut être soit de 12V soit de 24V et est monté directement au-dessus des MOSFETs pour un refroidissement optimal. L'absence de logique intégrée pour interpréter les commandes RC ou autres nécessite une interface logique externe pour convertir les entrées de commande en signaux PWM nécessaires pour piloter la carte. Ce choix de conception améliore la flexibilité, permettant à la carte d'être pilotée par n'importe quel microcontrôleur ou source de signal capable de fournir une logique PWM et Enable.
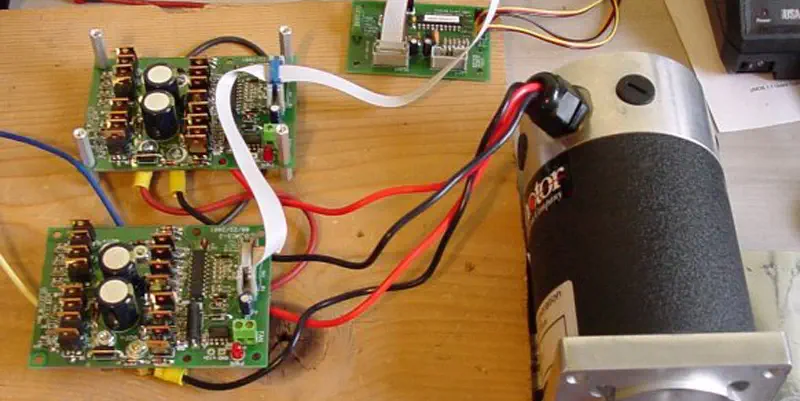
Un avantage significatif de cette conception est la capacité de mettre en parallèle des unités de puissance pour des applications spécialisées. Par exemple, deux cartes OSMC peuvent être utilisées sur un seul canal d'interface pour contrôler des moteurs à quatre balais de haute puissance, doublant efficacement la capacité de courant. Cette configuration permet une capacité de courant continu dépassant 300A, avec des tests de décrochage réussis ne montrant aucun échauffement significatif des cartes. De plus, cette configuration peut être adaptée pour piloter des paires de moteurs asservis, permettant des configurations telles que des robots à 4 roues ou 6 roues motrices utilisant un seul canal d'interface RC.
Remarque : Assurez-vous d'un refroidissement adéquat et d'une interface logique externe pour éviter la surchauffe et garantir des performances optimales.
- 1x Robot Power Open Source Motor Control 160A, 13-50V
- Tension d'alimentation : 13V à 50V (tension nominale maximale de la batterie de 36V)
- Courant de sortie continu : 160A
- Courant de sortie de pointe : Supérieur à 400A
- MOSFETs : 16 unités de IRFB3207 (ou IRF1405 sur les anciens modèles)
- Résistance maximale à l'état passant : 0,0026 ohms à 25°C
- Refroidissement : ventilateur de 40 CFM
- Pilote de pont : Intersil HIP4081A
- Interface logique : connecteur double rangée à 10 broches
- Interface RC : Externe via interface logique
- Alimentation : régulateur 12V, 0.5A
- Limitation de courant : Optionnel en supplément
- Connecteurs : Pads de soudure pour fil jusqu'à calibre 10 ou boulons #8