

















Description
- Bipède marcheur à base de servomoteurs R/C à 22 degrés de liberté, doté de mains à préhension
- Cinq degrés de liberté par jambe et bras
- Entièrement en supports en aluminium noir et Lexan noir
- Basé sur le Kit de montage de servomoteurs (SES)
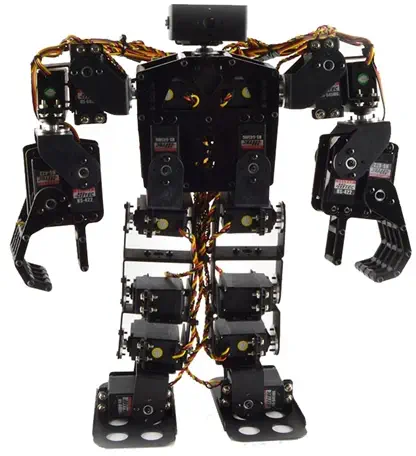
La Plateforme de Développement Humanoïde Pete Lynxmotion (Matériel Seulement) est un bipède marcheur à base de servomoteurs R/C à 22 degrés de liberté, doté de mains à préhension en tant que configuration par défaut. Cela permet à Pete de marcher vers l'avant ou l'arrière et tourner sur place vers la gauche ou la droite à vitesse variable. La conception de la jambe est similaire à celle d'un humain. Pete dispose de cinq degrés de liberté par jambe, de cinq degrés de liberté par bras et de deux degrés de liberté pour la tête. Il est important de noter qu'à ce jour, Pete est une plate-forme de recherche et nécessite que l'utilisateur crée son propre algorithme de marche et complète l'électronique pour que la fonctionnalité soit télécommandé ou autonome.
Remarque : seuls les supports et le matériel sont compris ; aucun servomoteur ou électronique n'est inclus.
La mécanique
Le robot est constitué de supports pour servomoteur en aluminium anodisé noir et de composants structuraux ultra résistants en Lexan découpés au laser. Comme l'ensemble est basé sur le Kit de montage de servomoteurs (SES), les pièces peuvent être facilement utilisées (conjointement avec différentes autres pièces vendues séparément) pour fabriquer un grand choix d'autres robots tels que des quadrupèdes, des hexapodes, des bras robotiques et bien plus encore.

- 1 x Torse bipède - A (sans servomoteurs) BT-01
- 2 x Main robotique - A (sans servomoteurs) RH-01
- 1 x Pied robotique en aluminium noir (une paire) ARF-01
- 6 x Support de servomoteur en « C » en aluminium avec roulements à billes (une paire) ASB-09*
- 7 x Support de servomoteur multi-usage en aluminium (une paire) ASB-04*
- 4 x Support de servomoteur à décalage avec roulements à billes (une paire) ASB-11
Nécessite
Des servomoteurs classiques ou puissants
- 14 x Servomoteur de taille standard HS-645MG
- 8 x Servomoteur de taille standard HS-422HB pour les mains, les poignets, les genoux et la tête
Électronique :
- 1 x Contrôleur de servomoteur SSC-32
- 1 x Câble de communication ou câble adaptateur USB/série
- 4 x Câble d'extension pour servomoteurs
- Ensemble batterie de 6 V avec chargeur
- Largeur : 7.5"
- Hauteur : 11.75"
- Garde au sol : 6.25"
- Poids (sans les batteries) : 1,125 kg
Site Web
- Nombre de degrés de liberté par jambe : 5
- Contrôle des mouvements des servomoteurs : boucle locale fermée
- Amplitude de mouvement par axe : 180 degrés
- Précision de mouvement par axe : en fonction du contrôleur de servomoteur (SSC-32: 09°)
- Tension du servomoteur : 6 VCC