

















Description
- Accessoires du kit JetRacer Pro ROS AI, deux contrôleurs, à l'exclusion du contrôleur, de la carte TF et du lecteur
- Kit avancé JetRacer Pro ROS AI
- Pack complet avec accessoires
- Deux contrôleurs pour une expérience fluide
- Idéal pour les utilisateurs débutants et expérimentés
- Élevez les projets de robotique et d'IA
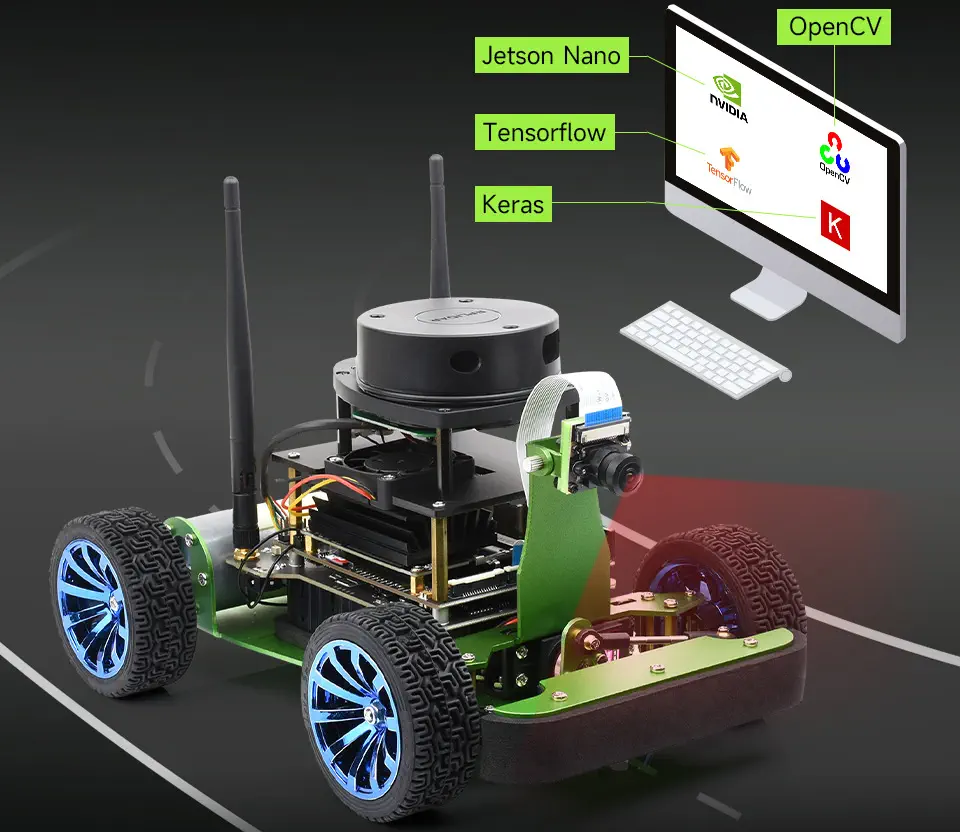
Les accessoires du kit JetRacer Pro ROS AI, deux contrôleurs, à l'exclusion du contrôleur, de la carte TF et du lecteur sont un ensemble sophistiqué et avancé conçu pour élever vos projets de robotique et d'intelligence artificielle vers de nouveaux sommets. Ce kit complet est livré avec une multitude d'accessoires et de contrôleurs doubles, vous fournissant les outils nécessaires pour créer une expérience fluide et efficace. Veuillez noter que le contrôleur, la carte TF et le lecteur ne sont pas inclus dans ce package.
Le kit JetRacer Pro ROS AI dispose d'un éventail impressionnant de spécifications, garantissant que vos projets sont pris en charge par une technologie de pointe et des composants de premier ordre. Les dimensions du kit ont été méticuleusement conçues pour offrir une fonctionnalité optimale et une facilité d'utilisation, ce qui en fait un choix idéal pour les débutants comme pour les utilisateurs expérimentés.
Améliorez vos projets de robotique et d'IA avec le kit JetRacer Pro ROS AI et découvrez la différence que des composants de qualité et une technologie de pointe peuvent faire. Commandez le vôtre aujourd'hui et libérez le plein potentiel de vos créations.
- 1 x châssis JetRacer ROS
- 1 x pièce acrylique
- 1 x support de caméra
- 1 x carte d'extension JetRacer ROS
- 1 x RPLIDAR A1
- 1 x caméra IMX219-160
- 1 x sans fil-AC8265
- 1 x adaptateur USB
- 2 x Moteur encodeur haute puissance
- 1 x couvercle de moteur
- 1 x support servo
- 1 x servomoteur MG996R
- 4 x pneus de 65 mm
- 1 x ventilateur de refroidissement
- 1 x coussinet en feutre EVA 2PCS
- 1 x manette de jeu sans fil
- 2 x câble PH2.0 6 broches
- 2 x Antenne 2PCS
- 1 x adaptateur IPEX vers SMA 2PCS
- 1 x chargeur de batterie 12,6V 2A
- 1 x ensemble d'outils et d'accessoires
- 1 x papier échiquier
- 1 x paquet de vis
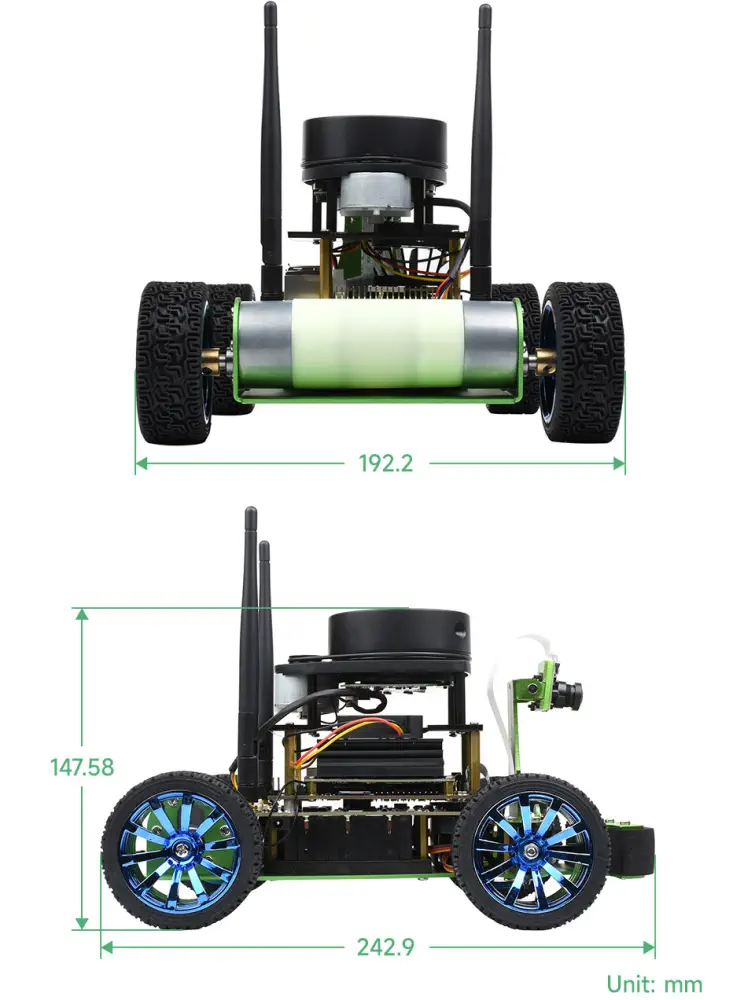
Taille
- 192,2 x 242,9 x 147,58 mm (L x l x H)
- Microcontrôleur : Puce Raspberry Pi RP2040
- Moteur : 37-520 Moteur d'encodeur métallique | Taux de réduction 1h30 | Vitesse de ralenti 333RPM
- Encodeur de moteur : capteur de vitesse Hall à phase AB à 11 fils, prend en charge l'odométrie des roues
- Capteur IMU : MPU9250
- LIDAR : RPLIDAR A1
- Interface audio : un haut-parleur, deux microphones, prend en charge la parole intelligente.
- Navigation cartographique : prise en charge