



Description
- DOBOT Magician Go Plateforme Mobile
- Caractéristiques des roues Mecanum omnidirectionnelles
- Intègre la vision IA pour des tâches autonomes
- Prend en charge la programmation Blocky et Python
- Offre une vision de caméra IA de haute qualité
- Gère efficacement jusqu'à 5 Kg de charge
La DOBOT Magician Go Plateforme Mobile est un outil éducatif avancé conçu pour les environnements d'apprentissage STEAM. Elle dispose d'un système omnidirectionnel alimenté par des roues Mecanum, lui permettant de se déplacer sans effort dans n'importe quelle direction, y compris horizontalement, latéralement et en rotation, sans modifier sa position. Cette capacité améliore sa polyvalence dans divers contextes éducatifs.
Équipée d'un odomètre intégré, la plateforme fournit des informations de position en temps réel, essentielles pour une navigation et un contrôle précis. L'intégration de la vision IA et des capacités de conduite automatique, soutenues par la reconnaissance visuelle localisée, permet à la plateforme d'effectuer des tâches complexes de manière autonome. Cette fonctionnalité est particulièrement bénéfique pour enseigner aux étudiants l'intelligence artificielle et la robotique de manière pratique et concrète.
La plateforme prend en charge à la fois la programmation graphique et Python, la rendant accessible aux apprenants de différents niveaux d'expertise en programmation. Le logiciel de contrôle, DobotLab, facilite la programmation via Blocky et Python, offrant une expérience d'apprentissage flexible. Le contrôleur Magic Box, alimenté par un CPU ARM 32 bits Cortex-M4, assure un traitement et un contrôle efficaces des fonctions de la plateforme.
Une caméra IA, dotée d'un processeur dual-core RISC-V 64 bits à 400 MHz, améliore les capacités visuelles de la plateforme. Avec une résolution de 1600x1200 pixels et un champ de vision de 150 degrés, la caméra fournit une entrée visuelle de haute qualité pour les tâches pilotées par IA. Cette fonctionnalité est essentielle pour enseigner aux étudiants la vision par ordinateur et ses applications.
Note : Assurez-vous de manipuler et d'utiliser correctement dans la plage de température de fonctionnement spécifiée de 0 - 35 °C pour maintenir des performances optimales et la sécurité.
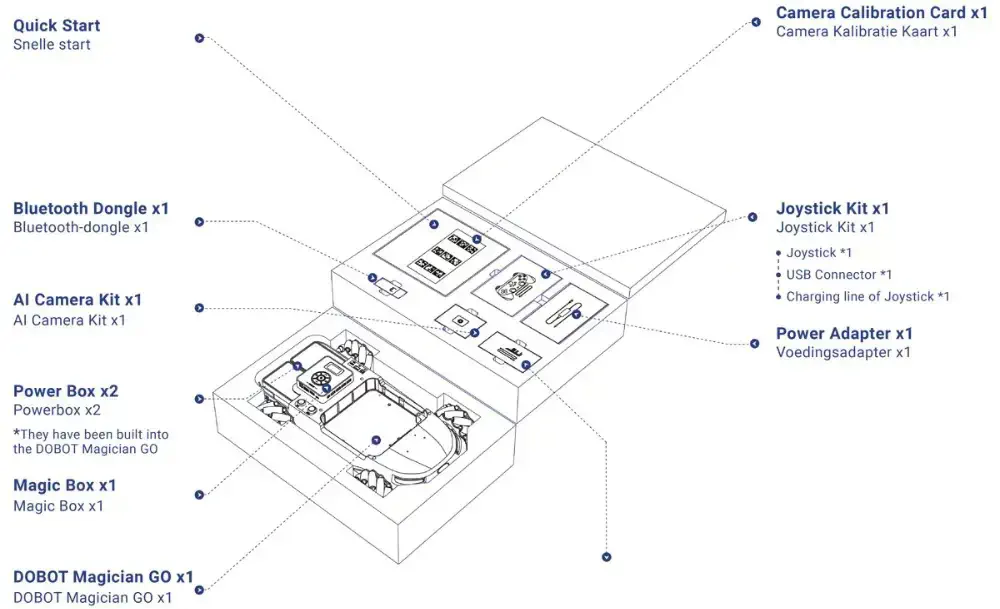
- 1x Carte de Démarrage Rapide & Calibration de Caméra
- 1x Dongle Bluetooth
- 1x Kit de Caméra IA
- 2x Boîte d'Alimentation (Intégrée dans Magician GO)
- 1x Magic Box
- 1x Adaptateur d'Alimentation
- 1x DOBOT Magician GO
- 1x Kit Joystick
- 1x Joystick
- 1x Connecteur USB
- 1x Changement de la ligne du Joystick
- 1x Kit d'Accessoires
- 1x Clé Allen 1,5 mm
- 1x Clé Allen 2,0 mm
- 1x Clé Allen 2,5 mm
- 1x Vis à tête hexagonale M2*25
- 2x Vis à tête hexagonale M3*6
- 2x Vis à tête fraisée hexagonale M3*8
- 2x Écrous hexagonaux M2
- 1x Câble USB
- DOBOT Magician Go : 463 x 293 x 125 mm (L x L x H)
- Dongle Bluetooth : 72 x 27,8 x 12,3 mm
- Joystick Sans Fil : 156 x 102 x 60 mm
- Caméra IA du Bras
- 54 x 61 x 28 mm (sans fixation)
- Type de lentille : 1/4-pouce
- Longueur Focale : 1,7 mm
- DOBOT Magician Go
- Modèle : DT-AC-GO4WD-01E
- Matériau Principal : Plastique Technique (ABS+PC), Alliages d'Aluminium, Acier Inoxydable (arbre rotatif, arbre de suspension)
- Mode de Communication : Télécommande 2,4 GHz, USB Série, Bluetooth
- Mode de Contrôle : Télécommande Joystick 2,4G, Contrôle Sans Fil Bluetooth, Contrôle Câblé, Contrôle par Script
- Poids : 5 Kg
- Performance
- Charge Maximale : 5 Kg
- Puissance Nominale : 60 W
- Temps d'Endurance : 150 min Max (Suivi de Ligne+Mouvement du Bras)
- Vitesse Maximale : 1 m/s
- Tension Nominale : 12 V
- Température de Fonctionnement : 0 - 35 °C
- Logiciel de Contrôle : DobotLab (Programmation Blocky/Python) *Coopération avec DobotLink pour la connexion et la mise à jour du firmware
- Contrôleur Magic Box
- Modèle : DT-MB-CTR01-1E
- CPU : ARM 32 bits Cortex-M4
- Tension de Fonctionnement : 10 - 12 V
- Interface d'Alimentation
- 4-Pin (2 Occupés)
- Alimente Magician GO et le bras robotique
- Port de Communication
- Interface de Communication 10-Pin (2 Occupés) (Pour la communication avec Magician GO et le bras robotique)
- Interface USB Type-C x1
- Pour la communication série PC
- Interface USB x1
- Pour un appareil USB étendu, y compris un récepteur Joystick
- Interface I/O
- 2 interfaces sont occupées pour contrôler le châssis et la caméra IA du bras
- 4 interfaces sont disponibles pour personnaliser I/O, AD, sortie PWM, I2C, etc.
- Interface Étendue du Moteur : Interface Étendue du Moteur x2 pour contrôler le moteur pas à pas
- Interface d'Alimentation 12 V : Interface d'Alimentation 12 V x2 pour l'entrée et la sortie d'alimentation
- Caméra IA du Bras
- Processeur IA (Puce de Contrôle Principal) : K210
- Cœur de la Puce : dual-core RISC-V 64BIT @ 400 MHz
- Mémoire : 8 Mb
- Flash : 16 Mb
- Interface
- USB Type-C
- Interface de communication 4-Pin
- Fente Micro-SD (Max. 32 GB pour l'expansion, une carte haute vitesse est recommandée)
- Paramètres de la Caméra
- Ouverture : F/2,4
- Pixel : 1600 x 1200px
- Puce du Module Caméra : OV2640
- Champ de Vision (FOV) : 150°
- Matériau : Plastiques Techniques (ABS+PC)
- Résolution de l'Écran LCD : 2x Écran LCD Couleur, Résolution 320x240
- Dongle Bluetooth
- Type de Connexion/Protocole de Communication : USB2.0, BLE4.2
- Portée de Transmission : 15 m (Champ Ouvert)
- Tension : 5 V
- Fréquence de Fonctionnement : 2,4 GHz
- Fonction
- Appariement Automatique
- Réponse à Un Bouton
- Poids : 20 g
- Joystick Sans Fil
- Capacité de la Batterie : 500 mAh
- Port de Chargement : Micro USB
- Type de Connexion : connexion sans fil 2,4 GHz
- Poids : 190 g