





Description
- Encodeurs de roue pour DFRobot 3PA et 4WD Rovers (2pk)
- L'encodeur utilise une méthode de non-contact pour convertir les signaux de déplacement angulaire
- Comprend les encodeurs, un tube en plastique, un joint à médiation papier, etc.
Voici les encodeurs de roues DFRobot pour DFRobot 3PA et 4WD Rovers (2pk). L'encodeur utilise une méthode de non-contact pour convertir les signaux de déplacement angulaire. Les capteurs photoélectriques de déclenchement utilisant l'échantillonnage pour identifier, sur le district de zone translucide et opaque pour représenter l'état du code, est « 1 » ou « 0 ». Par « a » et « 0 », des pulsations peuvent être utilisées pour calculer le niveau du rayon de braquage des roues de voiture de l'indice de pulsation. Avec ces données, il est même possible de calculer la distance des petites voitures, ainsi que leur vitesse (besoin de contrôler le chronométrage).
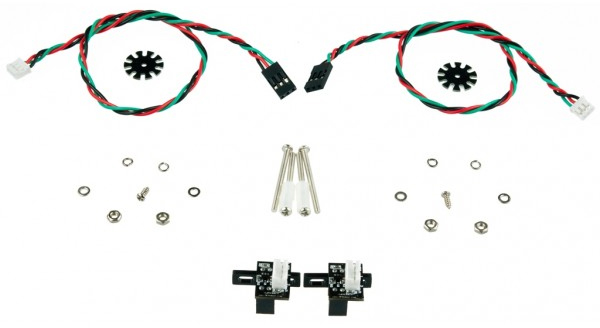
- Encodeur x 2
- Exemple de capteur photoélectrique d'interdiction x 2
- Tube en plastique x 4
- Joint à médiation papier x 4
- 4 jeux d'écrous de tige 5.M2.5x30 PRC
- Vis autotaraudeuses x 2
- Câble de capteur numérique x 2
Fichier ZIP
- Encodeurs de roue pour DFRobot 3PA et 4WD Rovers (2pk)
- L'encodeur utilise une méthode de non-contact pour convertir les signaux de déplacement angulaire
- Comprend les encodeurs, un tube en plastique, un joint à médiation papier, etc.
Voici les encodeurs de roues DFRobot pour DFRobot 3PA et 4WD Rovers (2pk). L'encodeur utilise une méthode de non-contact pour convertir les signaux de déplacement angulaire. Les capteurs photoélectriques de déclenchement utilisant l'échantillonnage pour identifier, sur le district de zone translucide et opaque pour représenter l'état du code, est « 1 » ou « 0 ». Par « a » et « 0 », des pulsations peuvent être utilisées pour calculer le niveau du rayon de braquage des roues de voiture de l'indice de pulsation. Avec ces données, il est même possible de calculer la distance des petites voitures, ainsi que leur vitesse (besoin de contrôler le chronométrage).