



Description
- Manipulateur robotique avancé à six axes (ARM) avec interface de commande ouverte
- Diamètre de portée de 2 mètres et capacité de levage de 4,5 kg (10 livres)
- Maintient la position sur 4 articulations inférieures lors de la mise hors tension
- Usiné en aluminium et fibre de carbone par commandes numériques
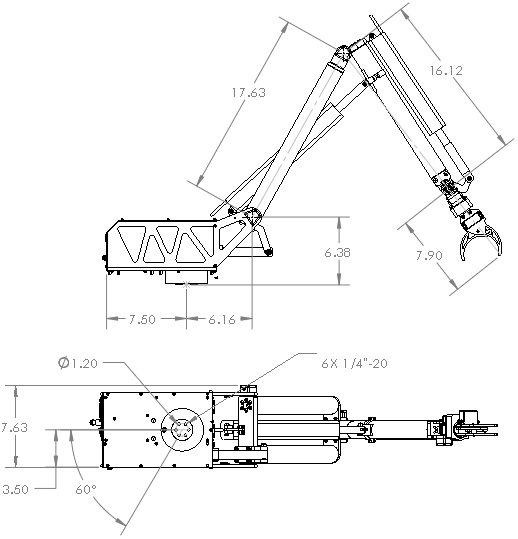
Le Bras Manipulateur Robotique Avancé (ARM 3.0) - Boucle Ouverte est un bras robotique à six axes doté d'une interface de commande ouverte pour permettre une implémentation simple dans d'autres projets. Chaque articulation reçoit des signaux MLI RC pour se positionner. Des segments en fibre de carbone et en aluminium de qualité aéronautique usinés par commandes numériques font de l'ARM 3.0 une unité robuste. Avec un diamètre de portée de plus de 2 mètres et une capacité de levage de 4,5 kg (10 livres), c'est un ARM d'une grande capacité. L'ARM 3.0 est supérieur à l'ARM 2.0 grâce à de meilleurs capteurs de position, des actionneurs linéaires plus robustes, et des contrôleurs de moteur plus puissants.

Ce bras à 6 degrés de liberté utilise des actionneurs linéaires et des servomoteurs rotatifs pour fournir une enveloppe de débattement de plus de 2 m de diamètre. Des roulements à billes étanches procurent de la précision aux mouvements à chaque articulation. Les quatre articulations inférieures utilisent des encodeurs absolus pour un contrôle précis et linéaire. La consommation de courant type à pleine capacité est d'environ 7 ampères. La vitesse de rotation d'une articulation de base est de 60 °/s. Le poignet tourne de 240 degrés en 2,3 secondes. La pince va de complètement ouverte à complètement fermée en moins de 1 seconde. La protection de retour de puissance et celle contre les surintensités sont intégrées dans l'appareil. Un interrupteur d'alimentation avec l'indication d'état « marche » par DEL verte se trouve sur le boîtier électronique.

Contrôle de la vitesse à boucle ouverte
Toutes les articulations de cette version de l'ARM fonctionnent en mode vitesse à boucle ouverte. Ce bras est plus convivial en utilisant un joystick ou une unité de radiocommande, ce qui permet à un opérateur humain de contrôler directement l'ARM. Lorsqu'il est connecté à une radio ou à un joystick, cet ARM maintient sa position lorsque le joystick est centré et ne commence à se déplacer que lorsque l'opérateur déplace le joystick du centre. Plus la manette est éloignée du centre, plus l'ARM se déplace rapidement. Si vous déplacez le joystick dans l'autre sens, l'ARM inverse sa direction. Cette version de l'ARM peut fonctionner dès sa sortie de la boîte en connectant une alimentation en 12 VCC et n'importe quelle radio RC standard au connecteur d'entrée.

Caractéristiques
- Rétroaction linéaire absolue depuis chaque articulation
- Commutateurs de fin de course aux extrémités des actionneurs linéaires
- Un robuste boîtier en aluminium accueille l'électronique de commande
- Connecteur DB-25 pour l'alimentation et l'entrée de signal
- Commutateur marche/arrêt sur la base
- Segments en fibre de carbone
- Fabrication en aluminium usiné par CNC
- Compatible avec les unités de contrôle par radio conventionnelles
- Indicateur DEL d'alimentation
- Alimentation de 12 VCC
- Connexion inversée protégée
Applications
- Projets de recherche en commandes robotiques
- Laboratoires universitaires d'ingénierie
- Manipulateur pour les véhicules terrestres sans pilote
- Compétitions robotiques
- Essais de produits dans des environnements dangereux
Fichier PDF
- Enveloppe de débattement : diamètre de 2,2 m (86,6 pouces)
- Capacité de levage : 4,5 kg (10 livres) en pleine extension
- Degrés de liberté : 6
- Interface : MLI RC
- Poids : 9,2 kg (20,4 livres)
- Entrée : 12 VCC et 7,5 A en crête