













Description
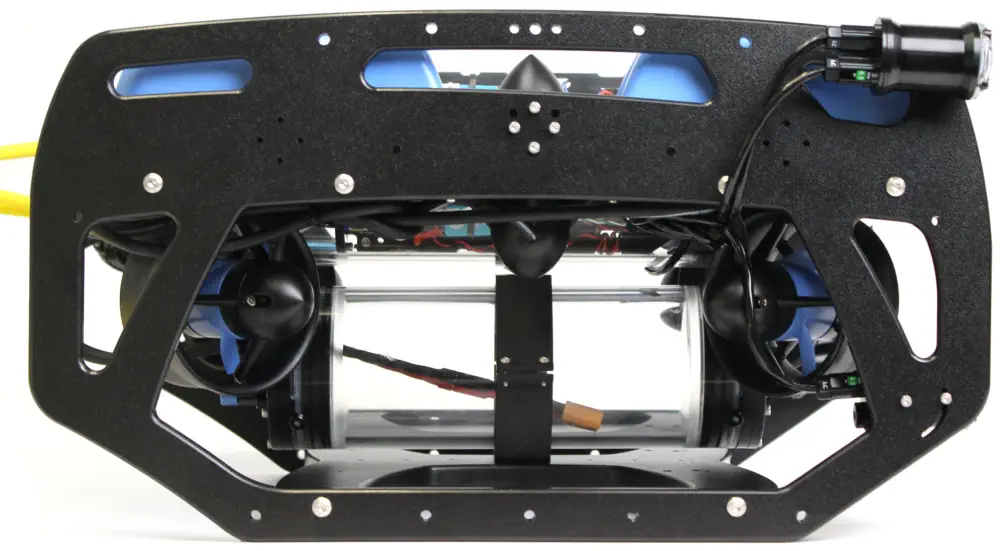
- BlueROV2 (Acrylique - 100m)
- Caractérisé par une caméra grand angle haute définition adaptée à la faible luminosité
- Supporte jusqu'à 6 000 lumens avec des lumières à intensité variable
- Utilise des propulseurs brevetés T2 pour un mouvement précis
- Fonctionne jusqu'à 100 mètres avec des boîtiers en acrylique
- Offre un design de cadre modulaire pour l'extensibilité
Le BlueROV2 (Acrylique - 100m) est un véhicule sous-marin télécommandé (ROV) abordable et performant, reconnu pour sa flexibilité et son extensibilité. Disponible en configurations à six et huit propulseurs, il supporte une variété d'accessoires et fonctionne sur un logiciel open-source, ce qui en fait un choix populaire parmi les drones sous-marins.
Le BlueROV2 nécessite un assemblage partiel, qui prend environ 6 à 8 heures à compléter. Ce processus d'assemblage fournit aux utilisateurs une compréhension complète des composants du système, facilitant les futures mises à niveau et améliorations.
Équipé d'une caméra haute définition, grand angle, adaptée à la faible luminosité, montée sur un mécanisme d'inclinaison, le BlueROV2 permet aux pilotes de contrôler l'inclinaison de la caméra pour des angles de vue optimaux. Le ROV peut être configuré avec deux ou quatre lumières Lumen à intensité variable, offrant jusqu'à 6 000 lumens pour éclairer les environnements sous-marins.
Le ROV utilise des propulseurs brevetés T2 dans une configuration vectorielle, offrant un rapport poussée/poids élevé et un mouvement précis dans toutes les directions. La configuration standard à six propulseurs peut être étendue à huit propulseurs en utilisant le kit de rénovation de configuration lourde, permettant un contrôle complet à six degrés de liberté et une stabilité accrue. Les niveaux de gain ajustables fournissent un contrôle de précision à basse vitesse et une puissance élevée pour naviguer dans les courants et transporter de lourdes charges.
Le BlueROV2 peut être configuré avec des boîtiers en plastique acrylique ou en aluminium anodisé. Les boîtiers en acrylique sont classés pour une profondeur de 100 mètres (328 ft), tandis que les boîtiers en aluminium peuvent atteindre des profondeurs allant jusqu'à 300 mètres (984 ft). Construit à partir de composants de haute qualité, le ROV comprend une pompe d'essai sous vide pour assurer une bonne étanchéité avant chaque plongée.
Conçu avec un cadre modulaire, le BlueROV2 est robuste et extensible, permettant l'ajout de divers accessoires tels qu'un préhenseur ROV ou un sonar de balayage. Un patin de charge utile est disponible pour étendre le cadre pour des charges utiles plus grandes, accueillant des instruments scientifiques, des boîtiers de batterie supplémentaires, et plus encore. Les utilisateurs peuvent modifier le cadre standard pour créer des robots sous-marins personnalisés adaptés à des applications spécifiques.
Le BlueROV2 est alimenté par le contrôleur de vol Navigator et le logiciel BlueOS. Le Navigator, un contrôleur spécialement conçu pour les ROV, comprend des capteurs embarqués tels qu'une unité de mesure inertielle (IMU), un magnétomètre et un capteur de fuite. Il dispose de 16 sorties pour connecter des propulseurs, des lumières, des préhenseurs et d'autres accessoires, ainsi que de multiples ports de communication pour les capteurs et les sonars. Couplé à un ordinateur Raspberry Pi 4, le Navigator exécute BlueOS, qui gère le contrôle du véhicule, la caméra, et les connexions de la liaison filaire, et facilite les mises à jour logicielles.
Le pilote contrôle le ROV via un ordinateur portable et une manette de jeu, en utilisant l'application open-source QGroundControl comme interface utilisateur. Cette application fournit des flux vidéo en direct, des retours de capteurs, et des paramètres de configuration.
Le BlueROV2 convient à la fois aux utilisateurs de ROV débutants et avancés, offrant de nombreuses options pour la personnalisation et l'expansion.
- 1x BlueROV2 (Acrylique - 100m)

- Caméra grand angle haute définition avec capacité de faible luminosité, résolution 1080p et 30 fps
- Lumières Lumen à intensité variable, avec une sortie maximale de 6 000 lumens
- Propulseurs brevetés T2 dans une configuration vectorielle pour la manœuvrabilité
- Niveaux de gain ajustables pour le contrôle de précision de l'appareil
- Classement de profondeur jusqu'à 100 mètres avec des boîtiers en acrylique
- La conception du cadre modulaire permet l'extensibilité
- Contrôlé par le contrôleur de vol Navigator et le logiciel BlueOS
- Les capteurs embarqués comprennent une IMU, un magnétomètre et un capteur de fuite
- 16 sorties disponibles pour divers accessoires tels que les propulseurs, les lumières et les préhenseurs
- Équipé d'un ordinateur Raspberry Pi 4 pour les tâches de traitement et de calcul
- Utilise l'application open-source QGroundControl pour l'interface utilisateur