





Paiements et sécurité
Vos informations de paiement sont traitées de manière sécurisée. Nous ne stockons pas les informations relatives aux cartes de crédit et n'avons pas accès à ces informations.
Description
- Aldebaran Robotics NAO6 Robot Humanoïde
- Robot bipède de 58 cm de haut avec 25 degrés de liberté
- Plateforme ouverte et entièrement programmable
- 4 microphones et haut-parleurs directionnels
- Batterie lithium-ion amovible de 27,6 Wh
- La reconnaissance vocale et le dialogue sont disponibles en 20 langues
Le Aldebaran Robotics NAO6 Robot Humanoïde est un robot bipède humanoïde qui a révolutionné plusieurs secteurs, tels que l'éducation, la santé, l'hôtellerie et le divertissement. Il s'agit probablement du robot « polyvalent » le plus emblématique et le plus ludique.
Idéal pour l'enseignement des matières STEM avec Python ou la programmation par blocs, NAO rend l'apprentissage amusant et accessible. C'est également un outil précieux pour toutes les matières, de l'école primaire à l'enseignement supérieur, ainsi que pour la formation professionnelle. Grâce à la nouvelle IA générative, n'importe qui peut créer des interactions infinies à partir de simples prompts.

NAO est le premier robot humanoïde créé par Aldebaran. Célèbre dans le monde entier, NAO est un outil de programmation ludique et est devenu un standard dans l'éducation et la recherche. NAO est également utilisé comme assistant par les entreprises et les centres de santé pour accueillir, informer et divertir visiteurs.
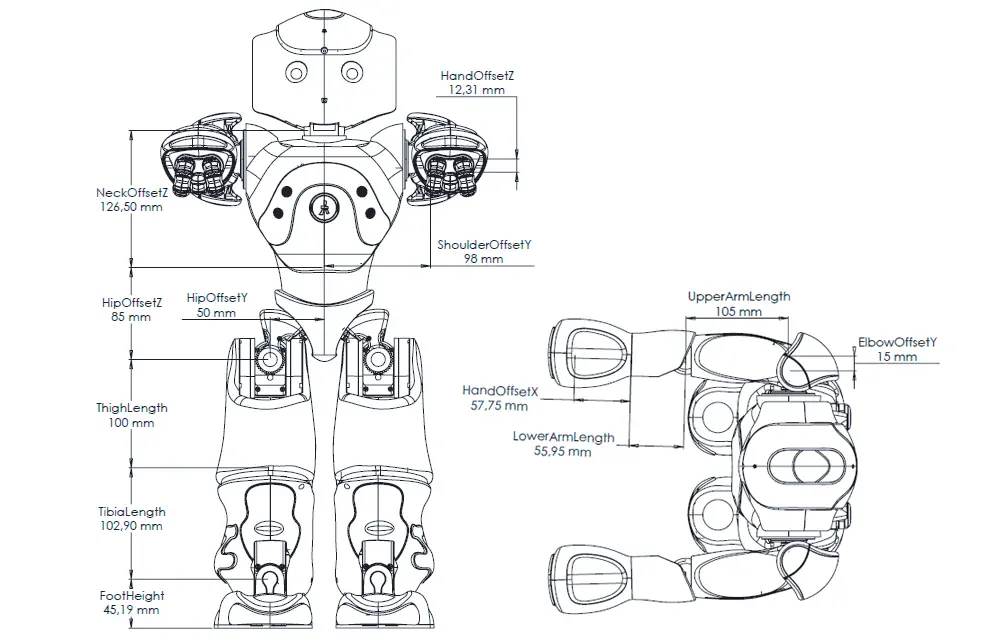
Mesurant 58 cm de haut, pesant 5,6 kg et doté de 25 degrés de liberté, NAO est un robot bipède aux caractéristiques agréablement arrondies. Avec plus de 19 000 NAO déployés dans plus de 70 pays, ce robot humanoïde a fait sa marque dans divers secteurs. Dans les établissements d’enseignement, de recherche et de soins aux personnes âgées, NAO est devenu indispensable pour stimuler l’innovation et améliorer les expériences.
- 1x Aldebaran Robotics NAO6 Robot Humanoïde
- 574 x 311 x 275 mm / 22,6 x 12,2 x 10,8 pouces
- CPU
- Processeur CPU: ATOM E3845
- Mémoire cache: 2 MB
- Fréquence d'horloge: 1,91 GHz
- RAM: 4 GB DDR3
- Mémoire Flash: 32 GB eMMC
- Langues
- Tchèque, Danois, Néerlandais, Anglais, Finnois, Français, Allemand, Italien, Japonais, Grec, Polonais, Portugais Européen, Portugais Brésilien, Espagnol, Suédois, Russe, Turc, Arabe, Brésilien, Mandarin Standard, Mandarin Taïwanais, Norvégien
- Audio
- Haut-parleurs: Gauche & Droit
- Impédance: 4 Ω
- Puissance audio: 87 dB +/- 3 dB
- Plage de fréquences: jusqu'à ~20 kHz
- Entrée: 2 W
- Microphones: x4 omnidirectionnels sur la tête
- Sensibilité: -12 dBV / PA à 1 KHz
- Plage de fréquences: 100 HZ à 10 KHz
- LEDs
- Tête tactile: 12 (16 niveaux de blanc)
- Yeux: 2x8 RGB FullColor
- Oreilles: 2x10 16 niveaux de bleu
- Bouton de poitrine: 1 RGB FullColor
- Pieds: 2x1 RGB FullColor
Caméra 2D
- Caméras: 2 à l'avant de la tête
- Modèle de capteur: OV5640
- Type de capteur: SoC - Capteur d'image CMOS
- Matrice d'imagerie
- Résolution: 5 MP
- Taille: 1/4 pouce
- Pixels actifs (HxV): 2592 x 1944
- Sensibilité
- Taille des pixels: 1,4 x 1,4 μm
- Plage dynamique: 68 dB à 8x gain
- Rapport signal/bruit (max): 36 dB
- Réactivité: 600 mV/lux-sec
- Sortie
- Sortie de la caméra: 640 x 480 à 30 fps
- Format de données: YUY & RGB
- Type d'obturateur: Obturateur roulant/exposition par trame
- Vue
- Champ de vision: 67.4° DFOV (56.3° HFOV, 43.7° VFOV)
- Plage de mise au point: 10 cm ~ ∞ ≈ 4 pouces - ∞
- Type de mise au point: Autofocus
Cadences
- 320x240 px @15, 30 fps @15, 30 fps
- 640x480 px @15, 30 fps @15, 30 fps
- 1280x960 px @15, 30 fps @10, 15 fps
- 1920x1080 px @15, 30 fps
- 2560x1920 px @15 fps
Capteurs d'environnement
- Gyromètre
- Axe: 3
- Précision: 5%
- Vitesse angulaire: 500°/s environ
- IMU
- Axe: 3
- Précision: 10%
- Vitesse angulaire: 2 g environ
- Mécanique
- Poids: 5,5 kg
Sonar
- Émetteurs: 2 à l'avant
- Récepteurs: 2 à l'avant
- Fréquence: 40 kHz
- Résolution: 1 cm @50 cm
- Plage de détection: 0,20 m à 0,80 m
- Cône effectif: 60°
Résistances sensibles à la force (FSR)
- Plage 0 à 25 N
- Emplacement: 4 dans chaque pied
- Sensibilité: 40 g environ
Boutons et capteurs
- Bouton de poitrine
- Pare-chocs de pied
- Tête tactile
- Main tactile
Énergie
- Batterie
- Type: Lithium-Ion
- Tension/capacité nominale: 21,6 V / 2,9 Ah
- Tension de charge max: 25,2 V
- Courant de charge recommandé: 1,8 A
- Courant de charge/décharge max: 2,1 A / 2,0 A
- Énergie: 62,5 Wh
- Durée de charge: 90 min
- Autonomie: 60 min (Utilisation active), 90 min (Utilisation normale)
- Chargeur de batterie
- Entrée: 100 à 240 V AC – 50 / 60 Hz – Max 1,2 A
- Sortie: 25,2 V DC – 2 A
Mouvement
- Tête: 2 DoF
- Bras (dans chaque): 5 DoF
- Main (dans chaque): 1 DoF
- Bassin 1 DoF
- Jambe (dans chaque): 5 DoF
Moteur
- Type de moteur: Moteur à balais DC sans noyau
Logiciel
- Open Nao:
- GNU/Linux embarqué
- Distribution basée sur Gentoo
- Architecture: 86
- Programmation:
- Embarqué: C++ / Python
- À distance: Java