





Description
- Robot mobile à 3 roues utilisant des roues omnidirectionnelles
- Pouvant se déplacer dans n'importe quelle direction
- Programmable en C et C++
- Facilement extensible
- Vient assemblé avec seulement les roues détachées
Nexus Robot présente le Kit robot mobile compatible Arduino omnidirectionnel et compact à 3 roues motrices. C'est un robot mobile à 3 roues motrices utilisant des roues omnidirectionnelles. Il est capable de se déplacer dans n'importe quelle direction en changeant la vitesse et la direction de chaque roue sans modifier son orientation. Il intègre un microcontrôleur, une carte d'extension E/S, un moteur CC avec encodeur, des capteurs IR et à ultrasons. Grâce à ses trous pré-percés pour les vis, il peut être facilement extensible.

Caractéristiques:
- 3 roues motrices
- Omnidirectionnel
- De taille compacte
- En alliage d'aluminium
- Facilement extensible
- Intègre un capteur à ultrasons
- Un moteur CC avec encodeur
- Code source libre
- Avec microcontrôleur Arduino
- Programmable en C, C++
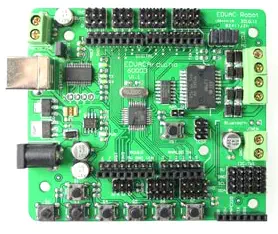
La carte microcontrôleur Arduino 328
C'est une carte microcontrôleur basée sur l'Arduino 168. Elle est dotée de 14 broches d'entrée/sortie numériques (dont 6 peuvent être utilisées comme sorties MID), de 8 entrées analogiques, d'un oscillateur à quartz de 16 MHz, d'une connexion USB, d'une prise de courant, d'une embase ICSP et d'un bouton de réinitialisation. Elle contient tout ce qui est nécessaire pour prendre en charge le microcontrôleur. Pour cela, branchez-la à un ordinateur au moyen d'un câble USB ou alimentez-la au moyen d'une batterie ou adaptateur CC/CA pour la démarrer.
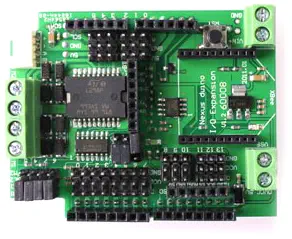
L'extension E/S Arduino
Nexus robot fournit l'extension fonctionnelle ultime pour l'extension E/S Arduino V1.2 et vous procure une facilité supplémentaire pour connecter des périphériques tels que des capteurs, des servomoteurs et des dispositifs RS485. Cette carte d'extension pour capteur permet de raccorder facilement un grand nombre de capteurs parmi les plus couramment utilisés.
- 3x Omni-roue en plastique de 100mm
- 3x Moteur Faulhaber 12V DC avec encodeur
- 1x contrôleur Arduino 328
- 1x Expansion Arduino IO
- 3x Capteur de distance à ultrasons
- 1x Batterie 12V NI-MH
- 1x chargeur 12V
Châssis :
- Aspect : circulaire
- Largeur maximale : 305 mm
- Hauteur : 126 mm
- Hauteur du châssis : 19 mm
- Rayon : 152 mm
- Mode couplé : compactage
- Matériau : alliage d'aluminium
- Couleur : jaune, noir
- Vitesse : 0,6 m/s
- Pourcentage de pente pouvant être montée : 20º
- Capacité de charge : 15 kg
- Compatible PC104 : oui
Roue :
- Type : roue omnidirectionnelle à 90°
- Diamètre : 100 ou 123 mm
- Épaisseur : 38 mm
- Matériau : nylon ou alliage d'aluminium
- Capacité de charge : 15 kg
- Matériau : caoutchouc ou nylon
- Diamètre du rouleau : 19 mm
- Longueur du rouleau : 19 mm
- Mode couplé : tube ou roulements en laiton
Moteur :
- Type : moteur sans noyau Faulhaber de 12 VCC
- Alimentation : 17 W
- Tr/min : 120 tr/min
- Diamètre : 30 mm
- Longueur : 42 mm
- Longueur totale : 85 mm
- Diamètre de l'arbre : 6 mm
- Longueur de l'arbre : 35 mm
- Courant hors charge : 75 mA
- Courant en charge : 1 400 mA
- Rapport d'engrenage : 64:1
Encodeur :
- Type : optique
- Phases de l'encodeur : AB
- Résolution de l'encodeur : 12 CPR
Microcontrôleur :
- Embase ICSP pour le téléchargement direct de programmes
- Interface série de niveau TTL
- Prend en charge AREF
- Accepte une embase à broches femelles et mâles
- Prises intégrées pour module RF APC220
- Cinq jeux de broches pour interface I2C
- Entraînement moteur bidirectionnel avec 2 A maximum de courant