





Payments and Security
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Description
- XGO Mini2 Quadruped Robot Dog with an extra Robot Arm
- Offers a 12 DOF quadruped robot dog
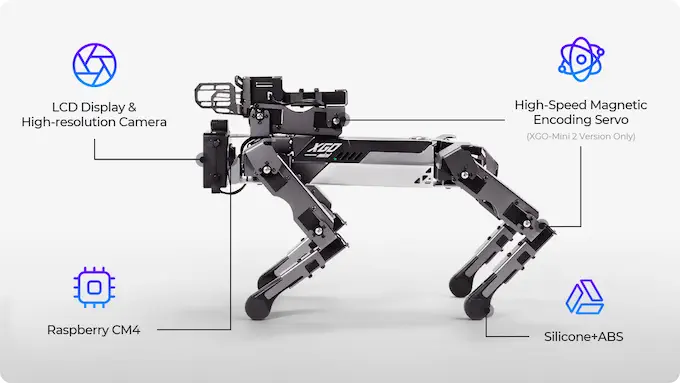
- Features LCD Display & High-resolution Camera
- Includes Raspberry CM4 Module
- Supports omnidirectional movement
- One-Button Design & exclusive App Control
The XGO Mini2 Quadruped Robot Dog is a desktop-sized AI quadruped robot with 12 degrees of freedom and a gripper powered by Raspberry CM4 for AI edge computing applications, which can achieve omnidirectional movement, six-dimensional posture control, posture stability, and multiple motion gaits.
The updated XGO Mini2 features the world’s first Raspberry Pi desktop robotic dog with an arm. It lets you discover, explore and change your world like never before.
Equipped with a 6-axis IMU, XGO 2's joint position sensor and electric current sensor provide feedback on its own postures, which can be used for algorithm verification and secondary development.
It can also be programmed by computer using Blockly and Python, making it the ideal metal pet for robot lovers and programming enthusiasts alike.

Advanced AI Interaction
XGO 2 comes equipped with fully functional AI modules that feature visual recognition, voice recognition, and gesture recognition, allowing it to hear, recognize, and respond to users like a real dog.

Additionally, it can decode QR codes, analyze audio, identify emotions, and more. With AI edge computing graphical programming, XGO 2 has the ability to perform even more functions than you might expect.
Teaching Mode
XGO 2 supports a teaching mode, allowing it to remember the joint positions of each action and execute the action group you have designed.
Raspberry Pi Compute Module 4 (CM4)
XGO 2 is powered by a Raspberry Pi Compute Module 4 (CM4), which boasts a Quad-Core Cortex-A72 CPU running at 1.5GHz. It offers wireless connectivity with dual-band 2.4GHz/5GHz Wi-Fi and Bluetooth 5.0 BLE. With 2GB/4GB of RAM for multitasking and 32GB of Micro SD card storage for the operating system, XGO 2 boasts a fast boot-up time and a smooth overall user experience.
Arm
With a 2.3 kg / 4.5 kg serial bus servo and a gripper that can open from 2.5cm to 5.5cm wide, XGO 2 can grasp, lift, carry, place, and drag a variety of items with its 3-degree-of-freedom arm. This opens up even more possibilities beyond just being a quadruped robot dog.
12 Degrees Of Freedom
Equipped with high-performance serial servos, 12 active joints, and kinematics decoupling, XGO 2 truly captures the movement and posture of quadruped animals. It can perform omnidirectional motion by moving forward and backward, left and right freely, with a smooth gait in any direction.
Self-Stabilization
XGO 2 also has a 6-IMU (Inertial Measurement Unit) system. Using the attitude data obtained from the IMU and closed-loop control, XGO 2 can stay stabilized regardless of surface movement.
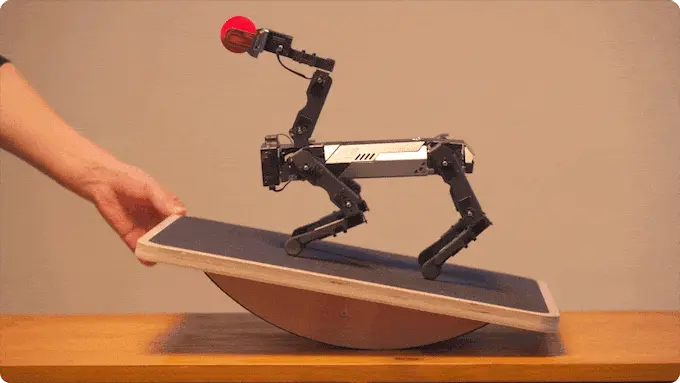
When its feet are still, the entire body remains under six degrees of freedom of motion control, providing unprecedented mobility and coordination of all instinctive and sophisticated movements.
Motion Gaot Planning
XGO 2 comes with three different gait strategies and rules, which are Trot, Walk, and High Walk. Based on the inverse kinematics algorithm, combined with machine dynamics optimization, XGO 2 realizes omnidirectional motion control based on Trot gait, twelve degrees of freedom motion control of the body, and supports superimposed control of attitude and motion control.
Programming
Powered by Raspberry CM4, the XGO 2 is open-sourced, allowing users to program it using Blocky and Python. Additionally, it comes with Robot Operating System (ROS) packages for developers. Whether you're a beginner or an experienced programmer, you can use or learn to program the XGO 2 with ease.
Collaborated with ELECFREAKS, XGO 2 can also work with micro:bit and Pico:ed. Enjoy the fun of learning and creating interesting functionality on your own! XGO-Mini 2 can also be extended by putting LiDAR LD06 on the back, or OAK-D-Lite on the arm.
- 1x XGO-Mini2 Robot Dog
- 1x 8.4 V 1 A Charger
- 1x Micro-USB Cable
- 1x User Manual
Size
- 270 x 150 x 180 mm (L x W x H)
- Host: Raspberry CM4 4 GB SDRAM
- Program: Blocky, Python, ROS
- Structure 1.5 mm AI alloy
- Weight: 915 g
- Servo: 15x 6 V 4.5 kg Seriel Bus Servo
- Leg & Foot: Silicone, ABS
- Client: ESP32
- Battery: 18650 2S 3500 mah
- Charger: 8.4 V 1 A
- Endurance: 2 h