Employs state-of-the-art SLAM Localization technology
Suitable for various settings, including supermarkets and hotels
Features ultra-long battery life and exceptional climbing ability
Max Load Weight: 60 kg
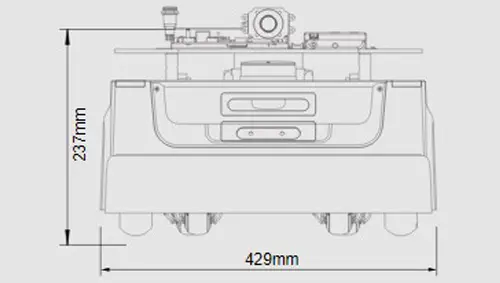
The Slamtec Robot Base Athena 2.0 is a compact development platform of small to medium size, constructed by SLAMTEC. It is designed with a compact structure and an extraordinary ability to navigate through narrow paths. The product incorporates the latest SLAM Cube 2 autonomous localization and navigation system, along with a laser vision navigation solution. This allows it to move autonomously and circumvent obstacles, providing a robust platform for swift secondary development and delivering optimal solutions for robot development.
The Athena 2.0 employs SLAM Localization and navigation solutions, a state-of-the-art technology in the field of robotics. This technology allows for simultaneous localization and mapping (SLAM) of robot environments. It utilizes cameras and LiDAR to generate precise and robust maps for navigation and obstacle avoidance. Furthermore, it can accurately locate itself in environments with fluctuating lighting conditions and avoid obstacles in real-time.
Maintaining the compact body design of its predecessor, Athena 1.0, the Athena 2.0 boasts impressive narrow aisle navigation capabilities. This makes it suitable for a wide array of narrow aisle scenarios. It has found extensive use in various settings, including supermarkets, shopping malls, restaurants, hotels, exhibition halls, and more.
As a robust robot development platform, the Athena 2.0 integrates an ultra-long battery life and exceptional climbing ability to meet the operational requirements of robots under various conditions. Remote management of registered Athena 2.0 platforms can be achieved through the SLAMTEC RoboCloud service, enabling more extended functionalities.
The Athena 2.0 operates on Slamtec’s autonomous localization and navigation solution, eliminating the need for QR codes to be pasted in the scene for location calibration. It is a fully open software and hardware platform that offers support for external hardware. Developers can utilize the Slamware SDK 2.0 for business logic application development.
Detection Range: 0.3m - 3.5m (Varies with lighting conditions)
Field of View (FOV): H:75±3°; V:51±3°
Low Obstacle & Cliff Detection Sensor
Quantity: 1
Minimum Detection Height for Low Obstacles: >3 cm
Magnetic Sensor (Default Disabled, Enabled when Needed)
Quantity: 2
Max detection range: 35 mm
Bumper
Quantity: 2
Trigger Mode: Physical Collisions
Detectable Minimum Force: 8N
Mapping performance
Map Resolution: 50 mm
Motion Performance
Maximum Moving speed: 1.2 m/s
Default Moving Speed: 0.7 m/s
Maximum Moving Speed in Mapping Mode: 0.6 m/s
Max Cross Slope: 10° Slope: Max slope angle of chassis: 10°; Slope = 18% × Ramp; The height of the full-machine mass center is within 18 cm, and the safety ramp within 10°. (A 100% slope means a 45° ramp, whose height difference for 100m is 100 m.)
Wheelset: 6.5 Inch In-Wheel-Motor x2 | 2.5 Inch Industrial Universal Wheel x4
User Interface
Hardware Interface
Power Connector: DC 24V 10A | DC 12V 2A
HDMI: 1x HDMI
Audio: 1x 3.5mm headset socket | 1x LINE_MIC audio jack (co-lay with headset socket) | 1x Dual-channel 5w/8Ω amplifier jack
Network Interface
Ethernet: 1x RJ45 Gigabit Ethernet port
Wi-Fi: 2.4GHz/5GHz
Software Interface: SLAMWARE: HTTP APIs support different programming languages and platforms, such as Windows, iOS, Android, and Linux
Ethernet
Wi-Fi: Network environment without authentication
4G: Supports 4G SIM cards from domestic and international carriers (customized according to needs)
Battery and Capacity
Capacity Specification: 20 Ah (Lithium Iron Phosphate Battery) (Add-on)
Stationary State: >19H (No-load, Ambient Temperature Environment)
No-load Operating Time: >15H (No-load, Ambient Temperature Environment)
Full-load Operating Time: 8H (40KG, Ambient Temperature Environment)
Charging Time: 3~4 h (Standard Charging docker)
Battery Life: Capacity decreases to 60% of the initial capacity after 2000 full charge and discharge cycles
If you are not satisfied with a product purchased from the Site, you may request a return within 30 days from the delivery date, unless the product is listed under the Return Exceptions below or is subject to specific return conditions noted on the product page.
This return policy also applies, as a minimum standard, to products sold and fulfilled by third-party vendors through the Marketplace.
Returns under this policy concern non-defective products. In the case of a confirmed manufacturing defect, remedies are handled under the Warranty terms, at the Vendor's discretion. See the Warranty section.
Return Conditions
To qualify for a refund under the 30-day return policy, all of the following conditions must be met:
A valid Return Authorization (RA) number must be obtained prior to returning the product. Returns without an RA number will be refused.
The RA number is valid for 30 days. The returned item must be received within that period.
The RA number must be included with the return.
Products must be returned in unused, unmodified condition (e.g., no scratches, alterations, missing parts, or signs of installation/use) and in their original packaging, suitable for resale.
Shipping fees are non-refundable. Return shipping costs are the responsibility of the customer, except in cases of a product confirmed defective through RobotShop's troubleshooting process or of a verified shipping error by RobotShop.
Refunds are processed within 7 days after receipt and inspection of the returned item.
A $100 cleaning fee may apply to domestic robots returned in used or unclean condition.
A 20% restocking fee may apply to large-quantity returns of items ordered specifically for the customer from the manufacturer or not part of RobotShop's standard inventory.
Return Exceptions
The following products are not eligible for return or refund under this policy:
Used, damaged, or modified products — Items that show signs of use, wear, or alteration, making them unsuitable for resale.
Consumables — Use and wear-and-tear components, altered or depleted through use (e.g., batteries, belts, brushes, gears, filament, tires, disposable bags, lubricants, greases, waxes, etc.). Not eligible for return once opened or used.
Perishables — Goods liable to deteriorate or expire rapidly. Not eligible for return.
Sealed goods (health or hygiene) — Items sealed for health-protection or hygiene reasons (e.g., masks, gloves, odor-absorbing products). Not eligible for return once unsealed.
Build-it-yourself products and items requiring customer assembly — Including robots & kits, robot parts, and other products requiring assembly or soldering. Not eligible for return once assembled, soldered, or installed.
Digital Goods, Software, and Apps — Final sale only, due to licensing restrictions.
Clearance Items — Products identified as clearance or final sale, including end-of-life or discontinued items.
Custom-made, personalized, or special-order items — Products manufactured, configured, adapted, or built to the customer's own specifications and requirements.
On-Demand Items — Standard catalogue products not stocked by RobotShop and ordered specifically to fulfill a customer request.
While the same return policy applies, these orders require a separate contact process for returns.
RobotShop Fulfilled Orders → submit a support ticket from your account under My Support Tickets.
Marketplace Vendor Orders → submit a ticket from your account under My Marketplace Tickets to contact the vendor directly.
Note: Marketplace vendor products are normally labelled with SKUs starting with RM, and identified on the product page with the mention "Sold and fulfilled by [Vendor Name]".