









Description
- ROBOTIS OpenMANIPULATOR-P RM-P60-RNH Open-Source Manipulator
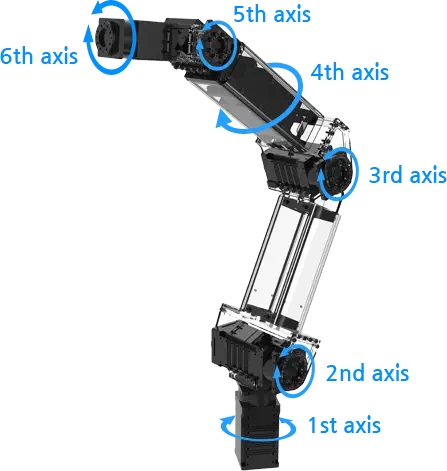
- Features H-Series DYNAMIXEL PRO+ Actuators (6-DOF)
- Lightweight design for easy setup and mobility
- Modular structure for easy expandability and maintenance
- Handles payloads suitable for small to mid-size operations
- Optimized for repetitive and highly precise operations
- Communication: RS-485
The ROBOTIS OpenMANIPULATOR-P RM-P60-RNH Open-Source Manipulator is based on ROS and OpenSource. Users can also control it more easily by linking it with MoveIt! package. Even if you don’t have an actual robot, you can control the robot in the Gazebo simulator.
The OpenMANIPULATOR-P (RM-P60-RNH) is composed of DYNAMIXEL-P. DYNAMIXEL has a modular form and adopts the daisy chain method. It allows users to easily add or remove joints for their own use. SDK with Kinematics Engine Provided (Examples: FK, IK, Profile Control).
- 1x ROBOTIS OpenMANIPULATOR-P RM-P60-RNH Open-Source Manipulator
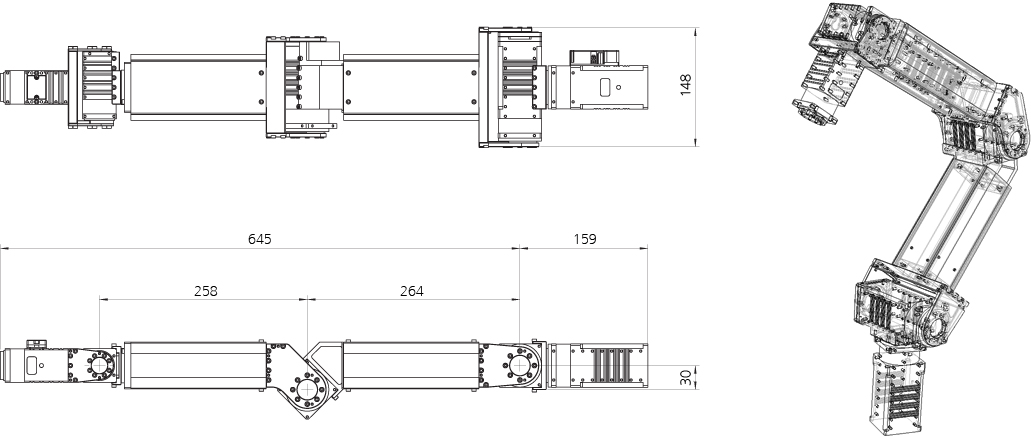
Size
- Reach: 645 mm
- Repeatability: ±0.05 mm
- DOF: 6
- Payload: 3 kg
- Speed (Each joint): 180°
- Rated Voltage: 24 V DC
- Communication: RS-485 (Multi-Drop Bus)
- Motor Output / Joint: 200 W / 2ea | 100 W / 2ea | 20 W / 2ea
- Actuators: H54P-200-S500-R x2 | H54P-100-S500-R x2 | H42P-20-S300-R x2
- Software: ROS (Ubuntu Linux)
- Controller: PC (Not included)
- Weight: 5.5 kg