



Description
- Four DOF (degree of freedom) leg design for dynamic range motion
- Perfect for adding weapons for local robot competition
- Made with ultra-tough aluminum servo erector set brackets
- Includes brackets, frame and hardware for 4DoF T-hex hexapod
- Advanced development kit
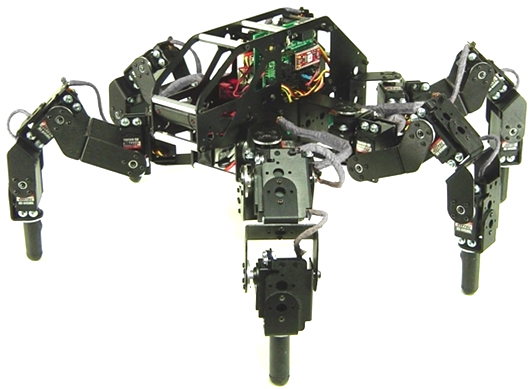
The Lynxmotion T-Hex 4DOF Hexapod Robot Kit (Hardware Only) is made from ultra-tough high-quality aluminum servo erector set brackets. The T-Hex robot's body is Mech inspired. The use of offset brackets on the legs provides additional range of movement. The four DOF (degree of freedom) leg design means the robot can walk in any direction, just like the 3DOF version. But the 4th axis really expands the dynamic range of the robot's range of motion. The robot has been designed to use 24 HS-645 servos for the legs. This Mech inspired robot is perfect for adding weapons for your local robot competition.
Note: Product differs from image shown
Controlling the Robot
By offloading the servo pulse generation and sequence movement timing to the SSC-32 the microcontroller has plenty of power to do some really cool things. The Phoenix program allows the robot to walk with variable speed, in any direction (translation), or turn in place (rotation), or any combination of the two. The leg lift and ride height is adjustable as well as the gait walking speed. You can rotate the body in every axis. All of these are accessible from the controller.
Note that this is NOT a toy but rather an advanced legged development platform. Mechanical assembly instructions are provided. but the user must select electronics and program the robot. The Phoenix code (compatible with Lynxmotion's BotBoarduino microcontroller + SSC-32 servo controller + PS2 remote control) can be adapted for use with this robot at the discretion of the user.
Includes
- 3x 4DoF T-Hex Leg pairs
- 1x T-Hex body
- 6 x Servo Extender Cable - 6''
- 6 x Servo Extender Cable - 12''
Requires (Sold separately)
- 24x Hitec standard sized servos
- Servo controller
- Microcontroller
- Battery (6V, 2500mAh+) / charger
- PS2 remote control & wiring