











Description
- Fictionlab Leo Rover 1.9 Assembled
- Offers robust, watertight construction
- Supports up to 20 kg with stiffer tires
- Equipped with Raspberry Pi 5 and 12.3 Mpx camera
- Ensures reliable ROS 2 operation
- Withstands -10°C to +40°C temperatures
The Fictionlab Leo Rover 1.9 Assembled is a robust, open-source 4x4 mobile robot that operates on the ROS 2 (Robot Operating System). It is designed to serve as a versatile development platform, catering to the needs of engineers, researchers, educators, and robotics enthusiasts. This platform arrives fully assembled, ensuring it is ready for immediate use and deployment in various applications.
The Leo Rover 1.9 is engineered for reliability and adaptability, featuring a watertight and sturdy construction that allows it to perform in diverse environments. It is equipped with a Raspberry Pi 5 and a 12.3-megapixel camera capable of live streaming, enhancing its functionality for research and educational purposes. The rover supports Wi-Fi connectivity, facilitating remote operation and control.

This mobile robot is capable of carrying a maximum payload of approximately 5 kg, which can be increased to 20 kg with the use of stiffer tires. It can achieve a maximum linear speed of around 0.4 meters per second and a maximum angular speed of approximately 1 radian per second. The rover is designed to overcome obstacles up to 70 mm in size, making it suitable for a variety of terrains.

The Leo Rover 1.9 is built to withstand operating temperatures ranging from -10 °C to +40 °C, and it has an IP protection rating of IP 55, ensuring its durability in challenging conditions. It offers a run time of up to 4 hours with its standard battery, and it can maintain a connection range of up to 100 meters, providing ample flexibility for outdoor and indoor projects.
Note: Ensure proper handling and operation within specified environmental conditions to maintain safety and performance.
- 1x Fictionlab Leo Rover 1.9 Assembled
- 1x 12.6V 2A Li-ion charger
- 1x Weipu SP13-3 - DC 5/2.1 mm adapter
- Maintenance tools
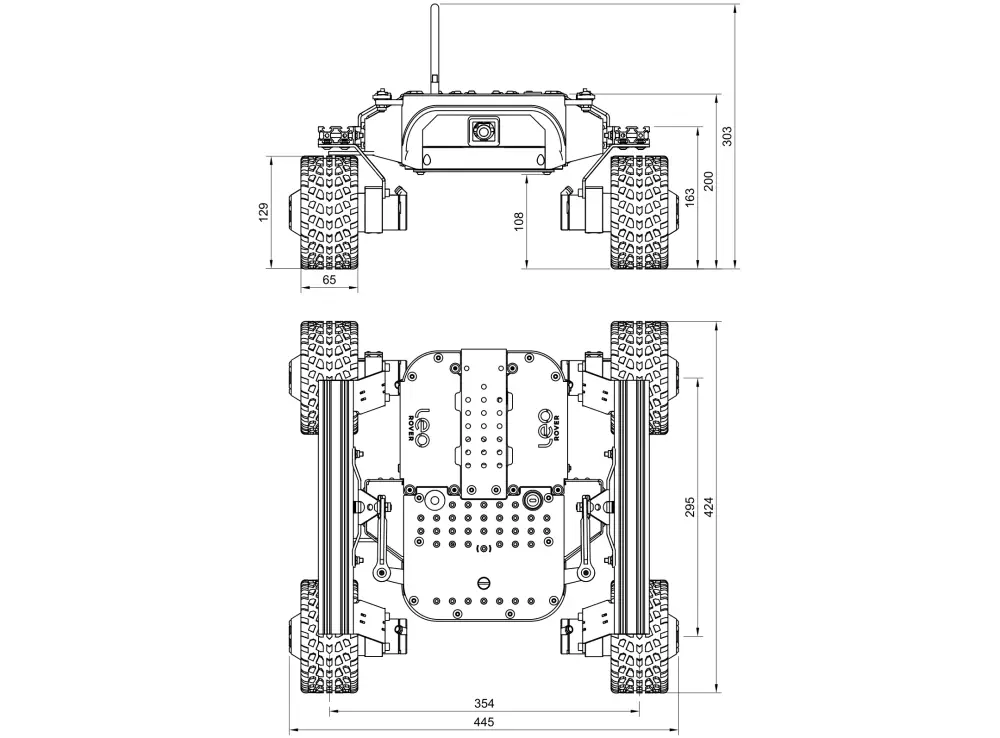
- 424 x 445 x 303 mm
- Maximum payload: Approximately 5 kg (up to 20 kg with stiffer tires)
- Maximum linear speed: Approximately 0.4 m/s
- Maximum angular speed: Approximately 1 Rad/s
- Estimated maximum obstacle size: Approximately 70 mm
- IP protection rating: IP 55
- Operating temperature: -10 °C to +40 °C
- Run time: Up to 4 hours with standard battery
- Connection range: Up to 100 m
- Raspberry Pi 5
- 12.3 MP camera with live streaming
- Watertight, sturdy construction
- Wi-Fi
- Open-source and ROS 1/2-based
- Weight: Approximately 7 kg