













Description
- BlueROV2 (Acrylic - 100m)
- Features high-definition wide-angle low-light camera
- Supports up to 6,000 lumens with dimmable lights
- Employs patented T2 Thrusters for precise movement
- Operates down to 100 meters with acrylic enclosures
- Offers modular frame design for expandability
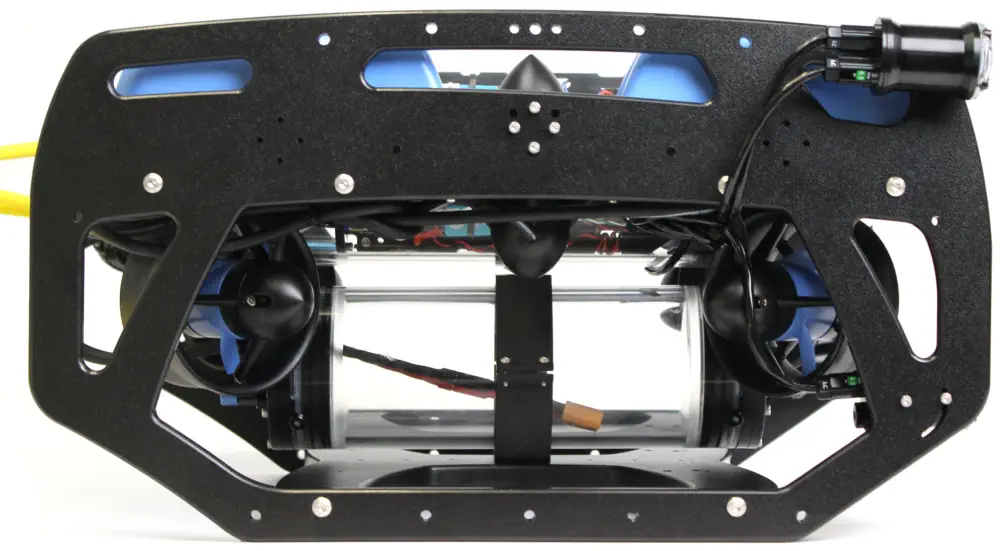
The BlueROV2 (Acrylic - 100m) is an affordable, high-performance underwater remotely operated vehicle (ROV) renowned for its flexibility and expandability. Available in six- and eight-thruster configurations, it supports a variety of accessories and operates on open-source software, making it a popular choice among underwater drones.
The BlueROV2 requires partial assembly, taking approximately 6-8 hours to complete. This assembly process provides users with a comprehensive understanding of the systems components, facilitating future upgrades and improvements.
Equipped with a high-definition, wide-angle, low-light camera mounted on a tilt mechanism, the BlueROV2 allows pilots to control the cameras tilt for optimal viewing angles. The ROV can be configured with two or four dimmable Lumen Lights, offering up to 6,000 lumens to illuminate underwater environments.
The ROV employs patented T2 Thrusters in a vectored configuration, delivering a high thrust-to-weight ratio and precise movement in any direction. The standard six-thruster setup can be expanded to eight thrusters using the Heavy Configuration Retrofit Kit, enabling full six-degree-of-freedom control and enhanced stability. Adjustable gain levels provide precision control at low speeds and high power to navigate currents and carry heavy loads.
The BlueROV2 can be configured with either acrylic plastic or anodized aluminum enclosures. The acrylic enclosures are rated to a depth of 100 meters (328 ft), while the aluminum enclosures can reach depths of up to 300 meters (984 ft). Constructed from high-quality components, the ROV includes a vacuum test pump to ensure a proper seal before each dive.
Designed with a modular frame, the BlueROV2 is robust and expandable, allowing for the attachment of various accessories such as an ROV gripper or scanning sonar. A payload skid is available to extend the frame for larger payloads, accommodating scientific instruments, additional battery enclosures, and more. Users can modify the standard frame to create custom underwater robots tailored to specific applications.
The BlueROV2 is powered by the Navigator Flight Controller and BlueOS. The Navigator, a purpose-built controller for ROVs, includes onboard sensors such as an inertial measurement unit (IMU), magnetometer, and leak sensor. It features 16 outputs for connecting thrusters, lights, grippers, and other accessories, along with multiple communication ports for sensors and sonars. Coupled with a Raspberry Pi 4 computer, the Navigator runs BlueOS, which manages vehicle control, camera, and tether connections, and facilitates software updates.
The pilot controls the ROV via a laptop computer and gamepad controller, using the open-source QGroundControl application as the user interface. This application provides live video streams, sensor feedback, and configuration settings.
The BlueROV2 is suitable for both entry-level and advanced ROV users, offering numerous options for customization and expansion.
- 1x BlueROV2 (Acrylic - 100m)

- High-definition wide-angle camera with low-light capability, 1080p resolution, and 30 fps
- Dimmable Lumen Lights, with a maximum output of 6,000 lumens
- Patented T2 Thrusters in a vectored configuration for maneuverability
- Adjustable gain levels for precision control of the device
- Depth rating of up to 100 meters with acrylic enclosures
- Modular frame design allows for expandability
- Controlled by the Navigator Flight Controller and BlueOS software
- Onboard sensors include an IMU, magnetometer, and leak sensor
- 16 outputs available for various accessories such as thrusters, lights, and grippers
- Equipped with a Raspberry Pi 4 computer for processing and computing tasks
- Uses the open-source QGroundControl application for the user interface