

















Paiements et sécurité
Vos informations de paiement sont traitées de manière sécurisée. Nous ne stockons pas les informations relatives aux cartes de crédit et n'avons pas accès à ces informations.
Description
- Robot bien proportionné de 1 m de haut en forme d'humanoïde
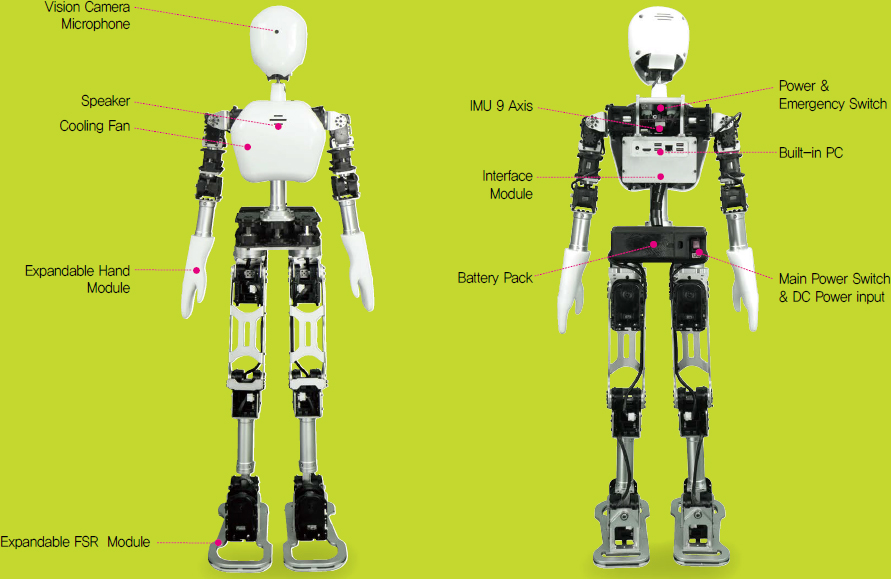
- Algorithme de détection de chute utilisant un capteur IMU à 9 axes
- Traitement de la vision 300FPS à 320x240 pixels
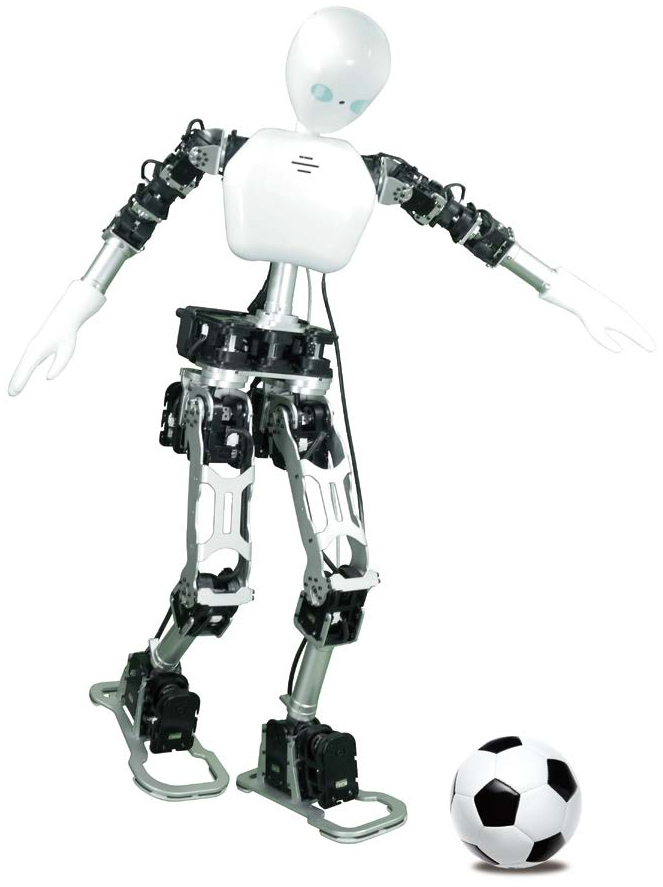
- Prend entièrement en charge le mode football pour la compétition Robocup
- Algorithme de marche pour robot humanoïde bipède avec contrôle d'équilibrage
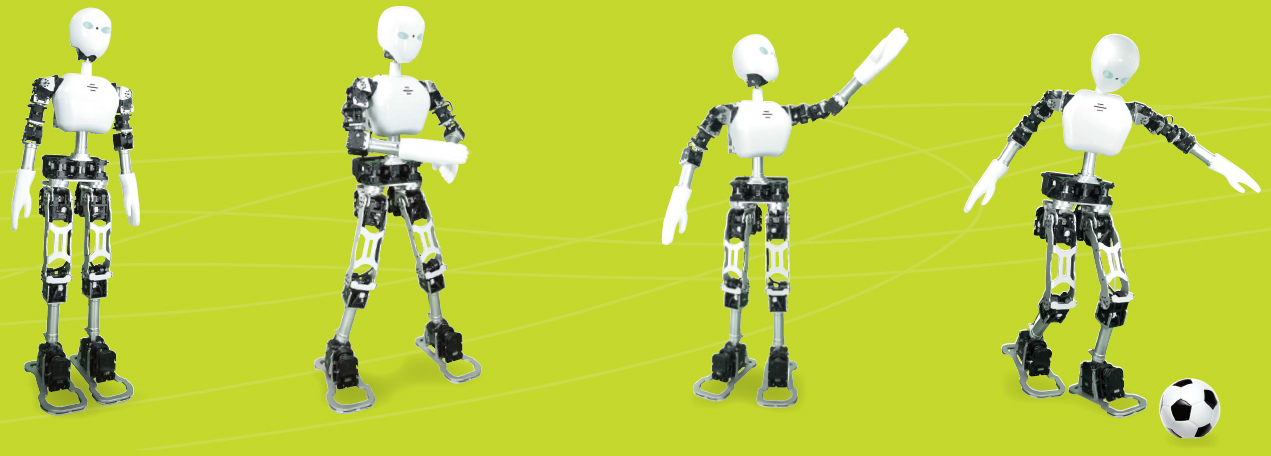
Le robot humanoïde Robobuilder UXA-90 est un robot humanoïde bien proportionné de 1 m de haut. Il a été conçu avec une structure similaire au ratio du corps humain idéal. Étant donné que la structure squelettique du robot imite celle d'un humain, il est possible de produire des modèles de mouvement de type humain. Parce qu'il utilise diverses sources de programmation, il peut être contrôlé de différentes manières. Le robot dispose également de gestes émotionnels et d'expressions buccales préprogrammés avec des sons synchronisés.

Fichiers source fournis pour la conception de l'ensemble du corps et fichiers STEP pré-reconçus pour l'extérieur et le cadre de base
Les utilisateurs peuvent créer une nouvelle apparence pour le robot à l'aide des différents fichiers sources prédéfinis. Les fichiers sources fournissent des détails pour assembler la structure tels que la taille, la position des dispositifs, des boulons et des écrous.
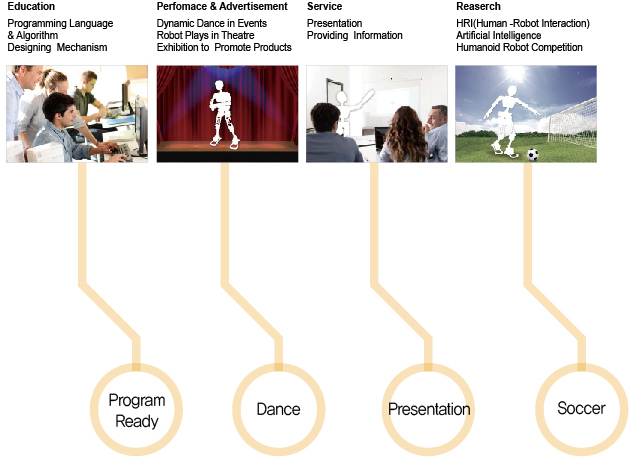
Fournir diverses applications
D'une performance sur scène à une présentation au nom d'une personne, ce robot fait tout. En outre, le robot peut être utilisé pour participer à une compétition de robots humanoïdes et peut également être utilisé comme plate-forme de recherche pour l'IRH et l'IA ainsi que pour l'enseignement de la programmation.
Éducation
- Langage de programmation et algorithme
- Mécanisme de conception
Performance et publicité
- Danse dynamique dans les événements
- Le robot joue au théâtre
- Exposition pour promouvoir les produits
Service
- Présentation
- Fournir des informations
Recherche
- HRI (Interaction Homme Robot)
- Intelligence artificielle
- Concours de robots humanoïdes
Fournir divers codes source de programmation et bibliothèques basées sur l'open source
Logiciel de reconnaissance d'objets basé sur Windows
- Code source Visual C# pour le suivi d'un objet avec traitement de vision
- UXA90 peut jouer au football seul à la compétition ROBOCUP
Outils logiciels de gestion
- Logiciel de contrôle SAM pour la gestion individuelle des servos
- Outil de création de contenu et de mouvement
- Outil de planification des modèles de comportement
- Outil de gestion des mouvements
Basé sur Android
- Application Android pour le contrôle et la construction
- L'application Android contrôle et crée des modèles de comportement et de mouvement sans fil
Basé sur Linux
- Cadre basé sur ROS
- Gazebo pour la simulation 3D de la dynamique des corps rigides
- Plugin Rviz pour environnement de visualisation 3D
Caractéristiques
- Conception du corps ressemblant à l'homme de Vitruve de Da Vinci
- Très bon pour taper dans le ballon et localiser le filet
- Discours et lecture des sons avec haut-parleur 3W
- Reconnaître et suivre la couleur et la forme d'un objet (par exemple une boule orange)
- Calculs de distance en temps réel
- Fonction de comportement de levée automatique intégrée à partir de la position couchée
- Fournir un outil logiciel pour créer facilement des mouvements de performance
- Le mouvement de performance peut être entièrement synchronisé avec la source sonore
Robot
- Hauteur : 100cm
- Largeur: 35cm
- Poids : 9kg
- Vitesse de marche : 30 cm/s, pas complet en marchant vers l'avant
Fichier PDF
Degrés de liberté
- 23 degrés de liberté
- Jambe 12 DOF, bras 8 DOF
- 1 taille DOF, 2 tête DOF
Bras 4-DOF (x2)
- Coude : 2 DOF SAM30 x2
- Épaule : 2 DOF (SAM160 x1/ SAM100 x1)
Jambe 6-DOF (x2)
- Hanche : 3 DOF (SAM160x1 / sam210 x2)
- Genou : 1 DOF (SAM210 x1)
- Cheville : 2 DOF (SAM210 x2)
- Taille 1-DOF (x1) : 1 DOF (SAM160x1)
- Tête 2 DOF (x1) : 2 DOF (SAM30 x2)
Capteurs
- Inertie : IMU 2g 9axis, +- 180 degrés (roulis/lacet), +-90 degrés (tangage)
- Module FSR (en option) x2 : 4 capteurs dans chaque pied
Ordinateur
- Processeur : processeur Intel Core i3-1115G4 (6 m de cache, jusqu'à 4,10 GHz),
- Samsung DDR4 8 Go PCS-21300
- Crucial P2 M.2 NVMe 250 Go TLC
- Sans fil : Bluetooth/Intel WI-FI 6 AX201
Interfaces externes
- USB 2.0 x2, Ethernet 10/100/1000 Base-T
- USB 3.0 x2, HDMI x1
Interfaces
- Haut-parleur : 1 ensemble
- Micro : 1 jeu
- Caméra de vision : HD 1920 x 1080 px
Batterie
- Type : LiPo 18,5 V, 3000 mA
- Durée de fonctionnement : 20min (mouvement fréquent) / 40min (veille)
- Temps de charge : 30min
Système d'exploitation : Windows 7 ou Linux Ubuntu 14.04
Basé sur Windows
- Logiciel de création de mouvements faciles/application C# en mode football/échantillons MSRDS avec capteur Kinect
- Mode football autonome, mode performance, mode présentation
- Mouvements de marche et de performance préprogrammés
Linux Ubuntu 20.04 LTS (ROS1 Noetic, OpenCV 4.xx, compilateur QT)
- Package middleware de base ROS
- Gazebo pour la simulation 3D de la dynamique des corps rigides
- Plugin Rviz pour environnement de visualisation 3D
- Marcher / Saisir / Reconnaissance Contrôle